Метод за определяне на номиналната скорост на ротора на електростатичен жироскоп. Механични характеристики на асинхронни двигатели
Асинхронен двигател преобразува електрическата енергия в механична. Механичните характеристики на асинхронен двигател, електромеханични и други съдържат информация, без която правилната му работа е невъзможна.
Този дизайн се използва широко в различни сфери на човешкия живот. Без тях работата на металообработващи машини, конвейери, повдигащи и транспортни машини е немислима. Двигателите с ниска мощност се използват широко в автоматизацията.
- Механична характеристика
- Експлоатационни характеристики
Асинхронно машинно устройство
Класическа асинхронна машина се състои от 2 основни части: ротора (движещ се) и статора (неподвижен). Три отделни фази съставят намотката на статора. С1, С2 и С3 - обозначения на началото на фазите. С3, С4 и С5 са съответно краищата на фазите. Всички те са свързани към терминалния съединител в модел на звезда или триъгълник, както е показано на фигури a, b, c. Веригата се избира, като се вземат предвид паспортните данни на двигателя и мрежовото напрежение.
Статорът създава магнитно поле вътре в двигателя, което постоянно се върти.
Роторът се разграничава между късо съединение и фаза.
При късо съединение скоростта на въртене не се регулира. Дизайнът с него е по-опростен и по-евтин. Началният въртящ момент обаче е твърде малък в сравнение с машините, които имат фазов ротор... Тук скоростта на въртене се контролира от възможността за въвеждане на допълнително съпротивление.
Принципът на работа на асинхронна машина
Прилагайки напрежение към намотката на статора, за всяка фаза можете да наблюдавате променящи се магнитни потоци, които се компенсират с 120 градуса един спрямо друг. Общият получен поток се оказва въртящ се и създава EMF вътре в роторните проводници.
Там се появява ток, който при взаимодействие с получения поток създава начален въртящ момент. Това води до въртене на ротора.
Възниква Slip S, т.е.разликата между скоростта на въртене на самия ротор n2 и честотата магнитно поле статор n1. Първоначално тя е равна на 1. Впоследствие честотата се увеличава, разликата n1 - n2 намалява. Това води до намаляване на въртящия момент.
На празен ход приплъзването е минимално. Той достига критична стойност Scr, когато статичният момент се увеличи. Превишаването на Scr води до нестабилна работа на машината.
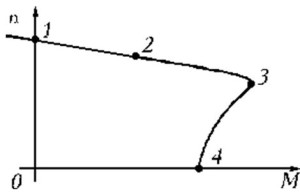
Механична характеристика
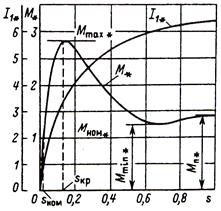
Като основна, тя помага да се извърши подробен анализ на работата на електродвигателя. Той изразява пряката зависимост на скоростта на въртене на самия ротор от електромагнитния момент n \u003d f (M).
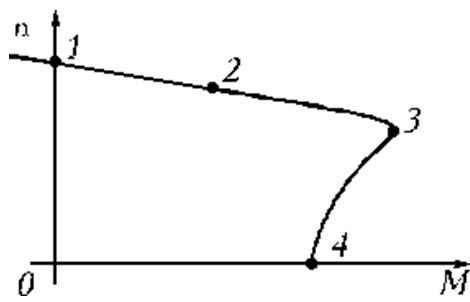 От графиката се вижда, че в раздел 1-3 машината работи стабилно. 3-4 е директен сегмент на нестабилна работа. Идеалният празен ход е в точка 1.
От графиката се вижда, че в раздел 1-3 машината работи стабилно. 3-4 е директен сегмент на нестабилна работа. Идеалният празен ход е в точка 1.
Точка 2 е номиналният режим на работа. Точка 3 - скоростта е достигнала критична стойност. Начален въртящ момент Mstart - точка 4.
Има технически методи за изчисление и изграждане механични характеристики като се вземат предвид данните от паспорта.
В началната точка 1 n0 \u003d 60f / p (p е броят на двойките полюси). Тъй като nn и Mn са директно координати на точка 2, изчисляването на номиналния въртящ момент се извършва по формулата Mn \u003d 9,55 * Rn / nn, където Rn е номиналната мощност. Стойността nн е посочена в паспорта на двигателя. В точка 3 Mcr \u003d Mnλ. Начален въртящ момент в точка 4 Mstart \u003d Mn * λstart (стойности λ, λstart - от паспорта).
Построена по този начин механична характеристика се нарича естествена. Чрез промяна на други параметри можете да получите изкуствена механична характеристика.
Получените резултати позволяват да се анализират и координират механичните свойства на самия двигател и работния механизъм.
Електромеханична характеристика
Това е зависимостта на ъгловата скорост на въртене от тока на статора. Използвайки множество контролни точки, можете да изградите електромеханична характеристика. Номиналният ток се изчислява по формулата:

Текущ празен ход е 30-40% от номинала.
Формула за изчисление за критично приплъзване:
Ток в началния момент на стартиране:
Всички стойности представляват електромеханична характеристика.
Експлоатационни характеристики
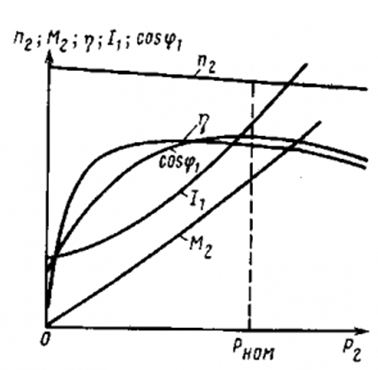 Експлоатационни характеристики асинхронен двигател е връзката на няколко параметъра с нетната мощност P2. Те включват: самата скорост на ротора n2, момента на вала M, приплъзване S, ток на статора I1, консумация на мощност P, коефициент на мощност СОSφ и ефективност.
Експлоатационни характеристики асинхронен двигател е връзката на няколко параметъра с нетната мощност P2. Те включват: самата скорост на ротора n2, момента на вала M, приплъзване S, ток на статора I1, консумация на мощност P, коефициент на мощност СОSφ и ефективност.
Освен това честотата електрически ток и напрежението е непроменено, за разлика от товара.
По правило експлоатационните характеристики на асинхронен двигател се изграждат в диапазона на стойностите на приплъзване от 0 до стойност, надвишаваща номиналната стойност с 10%. Това е зоната, в която машината е стабилна.
Скоростта на ротора n2 намалява с увеличаване на натоварването на вала. Но тези промени не надвишават 5%. Токът I1 се увеличава, тъй като при последващо увеличаване на натоварването активният му компонент надвишава реактивния.
COSφ на празен ход е малък. Но след това расте. При повишени натоварвания COSφ намалява поради нарастващото съпротивление вътре в намотката на ротора.
Ефективността на празен ход е 0. С увеличаване на товара се наблюдава рязкото му увеличаване и впоследствие намаляване.
В тази статия ще подчертаем темата за механичните и електрически характеристики електрически двигатели. Като използваме асинхронен двигател като пример, ще разгледаме такива параметри като мощност, работа, ефективност, косинус phi, въртящ момент, ъглова скорост, линейна скорост и честота. Всички тези характеристики се оказват важни при проектирането на оборудване, в което електрическите двигатели служат за задвижване. Днес асинхронните електрически двигатели са особено широко разпространени в индустрията, поради което ще се спрем на техните характеристики. Например, помислете за AIR80V2U3.
Типовата табелка (табелката с данни) на електродвигателя винаги показва номиналната механична мощност на вала на дадения двигател. Това не е електрическата мощност, която този електродвигател черпи от мрежата.
Така например, за двигателя AIR80V2U3, мощността от 2200 вата съответства точно на механичната мощност на вала. Тоест при оптимални работни условия този двигател може да работи механично от 2200 джаула всяка секунда. Нека определим тази мощност като P1 \u003d 2200 W.

За определяне на номиналната активност електрическа сила на асинхронен електродвигател, въз основа на данните от табелката с данни, е необходимо да се вземе предвид ефективността. Така че, за даденост ефективност на електродвигателя е 83%.

Какво означава? Това означава, че само част от активната мощност, подавана от мрежата към намотките на статора на двигателя и безвъзвратно консумирана от двигателя, се преобразува в механична мощност на вала. Активната мощност е P \u003d P1 / ефективност. За нашия пример, според дадената табелка, виждаме, че P1 \u003d 2200, ефективност \u003d 83%. Така P \u003d 2200 / 0,83 \u003d 2650 W.
Общата електрическа мощност, подавана към статора на електродвигателя от мрежата, винаги е по-голяма от механичната мощност на вала и повече от активната мощност, безвъзвратно консумирана от електродвигателя.

За да се намери общата мощност, е достатъчно да се раздели активната мощност на косинус phi. По този начин привидната мощност S \u003d P / Cosφ. За нашия пример P \u003d 2650 W, Cosφ \u003d 0,87. Следователно привидната мощност S \u003d 2650 / 0,87 \u003d 3046 VA.
Номинална реактивна електрическа мощност на асинхронен електродвигател
Част от общата мощност, подавана към намотките на статора на асинхронен двигател, се връща в мрежата. То .
Q \u003d √ ( S 2 - P 2)
Реактивната мощност е свързана с привидната мощност чрез sinφ и е свързана с активната и привидната мощност чрез квадратния корен. За нашия пример:
Q \u003d √ (3046 2 - 2650 2) \u003d 1502 VAR
Реактивната мощност Q се измерва във VAR - реактивни волт-ампери.
Сега нека разгледаме механичните характеристики на нашия асинхронен двигател: номинален въртящ момент на вала, ъглова скорост, линейна скорост, скорост на ротора и връзката му с честотата на мощността на двигателя.
На табелката с данни виждаме, че когато се захранва с променлив ток, роторът на двигателя прави при номинално натоварване 2870 об / мин, ние ще обозначим тази честота като n1.

Какво означава? Тъй като магнитното поле в намотките на статора се създава от променлив ток с честота 50 Hz, тогава за двигател с една двойка полюси (което е AIR80V2U3), честотата на "въртене" на магнитното поле, синхронната честота n, се оказва 3000 оборота в минута, което е идентично на 50 rps. Но тъй като двигателят е асинхронен, роторът се върти със забавяне на приплъзване.
Стойността на s може да бъде определена чрез разделяне на разликата между синхронната и асинхронната честота на синхронната честота и изразяването на тази стойност като процент:
s \u003d ((n - n1) / n) * 100%
За нашия пример s \u003d ((3000 - 2870) / 3000) * 100% \u003d 4,3%.

Ъгловата скорост ω се изразява в радиани в секунда. За да се определи ъгловата скорост, е достатъчно да се преобразува скоростта на ротора n1 в обороти в секунда (f) и да се умножи по 2 Pi, тъй като един пълен оборот е 2 Pi или 2 * 3,14159 радиана. За двигателя AIR80V2U3 асинхронна честота n1 е 2870 rpm, което съответства на 2870/60 \u003d 47.833 rps.
Умножавайки по 2 Pi, имаме: 47,833 * 2 * 3,14159 \u003d 300,543 rad / s. Може да се преобразува в градуси, като вместо това вместо 2 Pi заменете 360 градуса, тогава за нашия пример ще се получи 360 * 47,833 \u003d 17220 градуса в секунда. Такива изчисления обаче обикновено се извършват в радиани в секунда. Следователно ъгловата скорост ω \u003d 2 * Pi * f, където f \u003d n1 / 60.
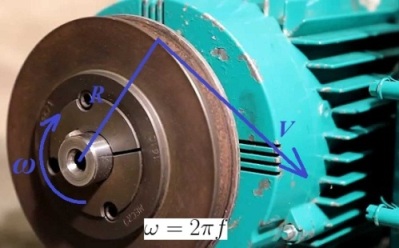
Линейна скорост v се отнася до оборудване, на което асинхронен двигател инсталиран като устройство. Така че, ако на вала на двигателя е монтирана ролка или, да речем, шмиргел с известен радиус R, тогава линейната скорост на точка на ръба на ролката или диска може да бъде намерена по формулата:
v \u003d ωR
Всеки асинхронен електродвигател се характеризира с номинален въртящ момент Mn. Въртящият момент M е свързан с механичната мощност P1 чрез ъгловата скорост, както следва:
P \u003d ω М
Въртящият момент или моментът на силата, действаща на определено разстояние от центъра на въртене, се запазва за двигателя и силата намалява с увеличаване на радиуса и колкото по-малък е радиусът, толкова по-голяма е силата, тъй като:
M \u003d FR
И така, колкото по-голям е радиусът на ролката, толкова по-малко сила действа върху ръба му, а най-голямата сила действа директно върху вала на двигателя.

За двигателя AIR80V2U3, показан като пример, мощността P1 е 2200 W, а честотата n1 е 2870 rpm или f \u003d 47.833 rps. Следователно ъгловата скорост е 2 * Pi * f, т.е. 300,543 rad / s, а номиналният въртящ момент Mn е равен на P1 / (2 * Pi * f). Mn \u003d 2200 / (2 * 3,14159 * 47,833) \u003d 7,32 N * m.
По този начин, въз основа на данните, посочени на табелката на асинхронния електродвигател, можете да намерите всички негови основни електрически и механични параметри.
Надяваме се, че тази статия ви е помогнала да разберете как са свързани ъгловата скорост, честота, въртящ момент, активна, полезна и привидна мощност, както и ефективността на електродвигателя.
БАЛАКОВ ИНСТИТУТ ПО ИНЖЕНЕРИНГ, ТЕХНОЛОГИЯ И КОНТРОЛ
ИНЖЕНЕРСКИ ФАКУЛТЕТ - СТРОИТЕЛСТВО
ОТДЕЛ "УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИТЕ СИСТЕМИ
ПРАКТИЧЕСКА РАБОТА No4
по дисциплина
Електромеханични системи
ИЗЧИСЛЕНИЕ НА ХАРАКТЕРИСТИКИТЕ НА АСИНХРОННИЯ ДВИГАТЕЛ
Вариант 13
Изпълнено: чл. гр. БЯЛ - 53
Колотилин И.С.
Мефедова Ю.А.
Цел 1. Трифазен асинхронен двигател с катерично-ротационен ротор от тип AIR 180 M2, използван като електрическо задвижване за конзолен помпен агрегат от марката VK 10/45, предназначен за изпомпване на вода за технически нужди, негорими и нетоксични течности, има следните номинални данни: мощност на вала P 2n = 30 kW; фиш S n = 0,025 (2,5%); честота на синхронно въртене n 1n \u003d 3000 об / мин; коефициент полезно действие п п \u003d 0.905 (90.5%); коефициент на мощност на намотката на статора cos φ n \u003d 0,88. Известно също: съотношението на началния въртящ момент към номиналния M p / М п \u003d 1,7; съотношението на пусковия ток към номиналния I p / I n \u003d 7,5; съотношението на максималния (критичен) въртящ момент към номиналния M max / M n \u003d 2,7. Двигателят се захранва от индустриален AC 380/220 V, 50 Hz. Необходимо е да се определи:
номинална скорост на ротора на двигателя;
въртящ се номинален, критичен и стартов момент на двигателя;
консумирана мощност от двигателя от мрежата Р 1н;
номинални и пусков токи;
5) стартов ток и въртящи моменти, ако напрежението в мрежата е намаляло спрямо номиналното с 5, 10 и 15% (U c \u003d 0,95 ∙ U n; U c \u003d \u003d 0,9 ∙ U n; U c \u003d 0,85 ∙ U n).
1. Номинална скорост:
n 2n \u003d n 1n ∙ (1 - S n ) \u003d 3000 ∙ (1 - 0,025) \u003d 2925 об. / Мин.
2. Номинален въртящ момент на вала:
3. Стартов момент на двигателя:
М стр \u003d 1,7 ∙ M n \u003d 1,7 ∙ 97,95 \u003d 166,5 N ∙ m.
4. Максимален въртящ момент:
M m ax \u003d 2,7 ∙ M n \u003d 2,7 ∙ 97,95 \u003d 264,5 N ∙ m.
5. Номиналната мощност P 1n, консумирана от двигателя от мрежата, се определя от израза:
η n \u003d P 2n / P 1n P 1n \u003d P 2n / η n \u003d 30 / 0.905 \u003d 33.15 kW;
при което номинален токконсумирана от двигателя от мрежата може да се определи от съотношението:
и стартовият ток ще бъде:
Аз н = 7,5 ∙ I 1n \u003d 7,5 ∙ 57 \u003d 427,5 A.
6. Определете въртящия момент, когато напрежението в мрежата намалее:
- с 5%. В този случай 95% от U H ще бъде подадено към двигателя , или U \u003d 0,95 ∙ U n . Тъй като е известно, че въртящият момент на вала на двигателя е пропорционален на квадрата на напрежението M ≡U 2, тогава ще бъде (0,95) 2 \u003d 0,9 от номинала. Следователно началният въртящ момент ще бъде:
M 5% \u003d 0,90 ∙ M p = 0,9 ∙ 166,5 \u003d 149,9 N ∙ m;
- с 10%. Освен това U \u003d 0,9 ∙ U n ;
М 10 % \u003d 0.81 ∙ M p \u003d 0,81 ∙ 166,5 \u003d 134,9 N ∙ m;
- с 15%. В този случай U = 0,85 ∙ U n;
M 15% \u003d 0,72 ∙ 166,5 \u003d 119,9 N ∙ m.
Имайте предвид, че работата при мрежово напрежение, намалено с 15%, е разрешена, например, с кулокранове само за завършване на работните операции и привеждане на работните органи в безопасно положение.
7. Откриваме как подобно намаляване на напрежението влияе върху пусковия ток на двигателя I p:
- с 5%. Като се има предвид, че стартовият ток може приблизително да се счита пропорционален на първата степен на мрежовото напрежение, получаваме:
I p5 % ≈0,95 ∙ I п = 0,95 ∙ 427,5 \u003d 406,1 A;
I p10 % ≈0,9 ∙ I п = 0,9 ∙ 427,5 \u003d 384,8 A;
I p15 % ≈0,85 ∙ I п \u003d 0,85 ∙ 427,5 \u003d 363,4 А.
Цел 2.Трифазен асинхронен двигател с ротор с катерица тип AIR 13256 има следните номинални данни: мощност на вала P 2n = 5,5 kW; фиш S n = 0,04 (4%); честота на синхронно въртене n 1n \u003d 1000 rpm; ефективност η n \u003d 0,85 (85%); коефициент на мощност на намотката на статора cos φ n \u003d 0,8. Известно също: съотношението на началния въртящ момент към номиналния M p / М п \u003d 2; съотношението на пусковия ток към номиналния I p / I n \u003d 7; съотношението на максималния (критичен) въртящ момент към номиналния M max / M n \u003d 2.2. Двигателят се захранва от индустриален AC 380/220 V, 50 Hz.
Определете мощността, консумирана от двигателя от индустриалната мрежа променлив ток 220 / 380V, 50Hz, ток в статорната верига при свързване към мрежата 220 / 380V и 220 / 127V, номинален въртящ момент на вала на двигателя.
1. Консумирана мощност от трифазен двигател от мрежата при номинален режим на работа:
P 1n \u003d P 2n / η n \u003d 5,5 / 0,85 \u003d 6,47 kW.
2. Токът, консумиран от намотката на статора от мрежата при свързване на намотката:
- звезда:
- триъгълник:
3. Номинален въртящ момент на вала на двигателя.
Първо, намираме номиналната скорост:
n 2n \u003d n 1n ∙ (1 - S n ) \u003d 1000 ∙ (1 - 0,04) \u003d 960 об / мин.
4. Намерете броя на двойките полюси p намотка на статора, като се има предвид, че честотата на индустриалната мрежа е= 50 Hz:

Цел 3.Трифазен асинхронен двигател с ротор с катерица със стандартен размер AIR 13256 се използва за задвижване на индустриална вентилационна единица. Използвайки техническите му данни, дадени в задача 2, конструирайте механична характеристика за него под формата на зависимост n 2 = f (M).
От израз:

където n 2n - скорост на ротора на двигателя при номинално натоварване;
n 1 - синхронна честота на въртене на магнитното поле на статора (в този случай n 1 \u003d 1000 rpm);
S n - приплъзване при номинално натоварване ( = 0,04)
Стойността на скоростта на ротора на двигателя в номиналния режим се определя:
n 2n = 1000 ∙ (1 - 0,04) \u003d 960 об / мин.
2. Според стойностите на S n и  , намираме критичното приплъзване:
, намираме критичното приплъзване:
3. Намерете номиналния M nom и максималния (критичен) M m моменти на ос:
4. За да конструираме механична характеристика, ще използваме формулите:
 ,
,
където S е текущата стойност на приплъзване.
Задавайки стойностите на S от 1 до 0, с необходимата стъпка (например, както е показано в таблица 3), изчисляваме стойностите н и М, съответстващи им. Въвеждаме резултатите в тази таблица и ги използваме за конструиране на механична характеристика n 2 = f (M).
На него отбелязваме (*) A, съответстващ на номиналния режим на работа.
Маса 1 - Резултати от изчисляването на механичните характеристики на електродвигателя
|
н, об / мин | ||||||||||||
|
М , N m |
![]()
Фигура 1 - Механични характеристики на трифазен асинхронен двигател p 2 = е(М) .
Резюмето е допълнено от статията на 6-та куса, 12 гр., Специално. 1801, Полукаров А.Н.
Държавен технически университет в Самара
Катедра "Електромеханика и нетрадиционна енергия"
Самара, 2006
1. Въведение.
Обща информация за асинхронните машини.
Асинхронната машина е електрическа машина с две намотки, в която само една намотка (първична) се захранва от електрическа мрежа с постоянна честота ω1, а втората намотка (вторична) е късо съединение или електрически съпротивления... В резултат се появяват токовете във вторичната намотка електромагнитна индукция... Тяхната честота ω2 е функция на ъгловата скорост на ротора Ω, която от своя страна зависи от въртящия момент, приложен към вала.
Най-широко разпространени са асинхронните машини с трифазна симетрична противоположна намотка на статора, захранвана от мрежа с променлив ток, и с трифазна или многофазна симетрична противоположна намотка на ротора.
Машините от този дизайн се наричат \u200b\u200bпросто „ асинхронни машини", Докато асинхронните машини от други конструкции се наричат" специални асинхронни машини. "
Асинхронните машини се използват предимно като двигатели; те рядко се използват като генератори.
Асинхронният двигател е най-често срещаният тип двигатели с променлив ток.
Противополюсната намотка на ротора на асинхронен двигател може да бъде късо съединение (клетка на катерица) или фаза (свързана с плъзгащи пръстени). Най-широко разпространени са двигателите с намотка на катерица на ротора, евтини в производство и надеждни в експлоатация, или двигатели с катерица. Тези двигатели имат твърда механична характеристика (когато натоварването се промени от празен ход в номинален, скоростта им намалява само с 2-5%).
Двигателите с намотка на катерица на ротора също имат доста висок начален стартов момент. Основните им недостатъци са: трудността да се приложи плавно регулиране на скоростта на въртене в широк диапазон; консумация на големи токове от мрежата при стартиране (5-7 пъти по-високи от мемориалния ток).
Двигателите с фазова намотка на ротора или двигателите с плъзгащи се пръстени се освобождават от тези недостатъци с цената на усложняване на конструкцията на ротора, което води до забележимо увеличение на разходите им в сравнение с двигателите с катерични клетки (с около 1,5 пъти). Следователно двигателите с плъзгащи се пръстени на ротора се използват само при тежки стартови условия, както и когато се изисква плавен контрол на скоростта.
Двигателите с плъзгащи пръстени понякога се използват в каскада с други машини. Каскадните връзки на асинхронна машина позволяват плавно регулиране на скоростта на въртене в широк диапазон при висок коефициент на мощност, но поради значителните разходи те нямат забележимо разпределение.
При двигатели с плъзгащи пръстени изходните краища на намотката на ротора, чиито фази обикновено са свързани към звезда, са свързани с три плъзгащи пръстена. С помощта на четки в контакт с пръстените може да се въведе допълнително съпротивление или допълнителна ЕМП във веригата на намотката на ротора, за да се променят стартовите или работните свойства на машината; четките също така дават възможност за късо съединение на намотката.
В повечето случаи допълнително съпротивление се вкарва в намотката на ротора само при стартиране на двигателя, което води до увеличаване на въртящия момент и намаляване на пусковите токове и улеснява стартирането на двигателя. Когато работи асинхронен двигател, стартовият реостат трябва да бъде напълно отстранен и намотката на ротора трябва да бъде късо съединена. Понякога асинхронните двигатели са оборудвани със специално устройство, което позволява след края на старта да затваря плъзгащите се пръстени и да повдига четките. При такива двигатели е възможно да се увеличи ефективността поради елиминиране на загубите от триене на пръстените срещу четките и електрическите загуби в преходния контакт на четките.
Асинхронните двигатели, произвеждани от фабриките, са проектирани да работят при определени условия с определени технически данни, наречени номинални. Номиналните данни за асинхронни двигатели, които са посочени на табелката с данни на машината, монтирана на тялото й, включват:
механична мощност, развивана от двигателя, Рн \u003d P2н;
мрежова честота f1;
напрежение на статорната линия U1ln
ток на статорната линия I1ln;
скорост на ротора nн;
коефициент на мощност cos φ1n;
ефективност ηн.
Ако трифазната намотка на статора има началото и краищата на фазите и тя може да бъде включена в звезда или триъгълник, тогава линейните напрежения и токове са посочени за всяка от възможните връзки (Υ / Δ).
В допълнение, за двигател с плъзгащ пръстен се дават напрежението на отворен пръстен със стационарен ротор и ток на роторната линия в номинален режим.
Класификацията на асинхронните двигатели варира в много широк диапазон. Оценена сила - от фракции от ват до десетки хиляди киловати. Номинална честота на синхронно въртене p1n \u003d 60 f1 / r при мрежова честота от 50 Hz от 3000 до 500 rpm и по-малко в специални случаи; при по-високи честоти - до 100 000 об / мин или повече (номиналната скорост на ротора обикновено е с 2-5% по-малка от синхронната; при микромоторите - с 5-20%). Номинално напрежение от 24 V до 10 kV ( големи стойности при високи сили).
Номиналната ефективност на асинхронните двигатели се увеличава с увеличаване на тяхната мощност и скорост; с мощност над 0,5 kW тя е 0,65-0,95, в микромотори 0,2-0,65.
Номинален коефициент на мощност на асинхронни двигатели, равен на съотношението активна мощност към привидната мощност, консумирана от мрежата,
също се увеличава с увеличаване на мощността и оборотите на двигателя; с мощност над 1 kW тя е 0,7-0,9; в микромотори 0,3-0,7.
Обща информация за режимите на работа на асинхронен двигател.
В моторния режим разликата между скоростта на ротора и полето на статора в повечето случаи е малка и възлиза само на няколко процента. Следователно, скоростта на ротора се изчислява не в абсолютни единици (rpm или rev / s), а в относителни, въвеждайки концепцията за приплъзване:
s \u003d (ps - n) / ps,
където ps е честотата на въртене на полето (синхронна честота на въртене); n е скоростта на ротора.
Приплъзването се изразява или в относителни единици (s \u003d 0,02; 0,025 и т.н.) или като процент (s - 2%; 2,5% и т.н.).
Честотата на тока и ЕМП, индуцирани в проводниците на намотката на ротора, зависят от честотата на тока и ЕРС на намотката на статора и от приплъзване:
f2 - f1s; E "2 - E1s,
където E1 е EMF на намотката на статора; E "2 - ЕМП на намотката на ротора, намалена до броя на завъртанията на намотката на статора.
Фигура: 2.1. Механична характеристика на индукционна машина
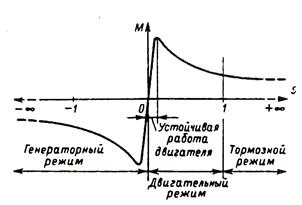
Теоретично асинхронната машина може да работи в диапазона на вариация на приплъзване s \u003d -∞ ... + ∞ (фиг. 2.1), но не и при s \u003d 0, тъй като в този случай n - ps и проводниците на роторната намотка са неподвижни спрямо статорното поле, ЕМП и токът в намотката е нулев и няма въртящ момент. В зависимост от практически възможното приплъзване се различават няколко режима на работа на асинхронни машини (фиг. 2.1): режим на генератор при s< 0, двигательный при 0 < s < 1, трансформаторный при s = 1 и тормозной при s > 1. В генераторния режим роторът на машината се върти в същата посока като полето на статора, но с по-висока честота. В моторното поле посоките на въртене на статорното и роторното поле съвпадат, но роторът се върти по-бавно от статорното поле: n \u003d ps (1 - s). В режим на трансформатор роторът на машината е неподвижен и намотките на ротора и статора не се движат един спрямо друг. Асинхронната машина в този режим е трансформатор и се различава от нея по местоположението на основната и вторични намотки (намотки на статора и ротора) и наличието на въздушна междина в магнитната верига. В режим на спиране роторът се върти, но посоката на въртенето му е противоположна на посоката на полето на статора и машината създава момент, противоположен на момента, действащ върху вала. По-голямата част от асинхронните машини се използват като двигатели и само много малък брой - в режими на генератор и трансформатор, в режим на спиране - за кратко.
За да се оценят механичните характеристики на асинхронен двигател, моментите, развити от двигателя при различни приплъзвания, обикновено се изразяват не в абсолютни, а в относителни единици, т.е.посочват кратността по отношение на номиналния въртящ момент: M * \u003d M / Mnom. Зависимостта M * \u003d f (s) на асинхронен двигател (фиг. 2.2) има няколко характерни точки, съответстващи на стартовия M * p, минимален M * min, максимален M * max и номинални M * номинални моменти.
Стартовият въртящ момент M * n характеризира началния момент, развит от двигателя директно, когато той е свързан към мрежата със стационарен ротор (s - 1). След стартиране на двигателя от мястото му въртящият момент леко намалява в сравнение със стартовия (виж фиг. 2.2). Обикновено M * min е 10 ... 15% по-малко от M * p. Повечето двигатели са проектирани така, че тяхната M * min да е по-голяма от M * nom, тъй като те могат да достигнат номинална скорост само ако моментът на съпротивление, приложено към вала, е по-малък от M * min.
Максималният въртящ момент M * max характеризира претоварващата способност на двигателя. Ако моментът на съпротивление надвиши M * max, двигателят спира. Следователно, M * max се нарича още критичен, а приплъзването, при което моментът достига своя максимум, се нарича критично приплъзване scp. Обикновено scr не надвишава 0,1 ... 0,15; в двигатели с повишено приплъзване (кран, металургични и др.), scp може да бъде много по-голям.
В диапазона 0< s < sкр характеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > scr двигателят не може да работи при нормални условия. Тази част на характеристиката определя стартовите свойства на двигателя от момента на стартиране до достигане на работната част на характеристиката.
Фигура: 2.2. Зависимостта на тока и въртящия момент на асинхронен двигател от приплъзване
Режимът на трансформатор, т.е. режимът, когато намотката на статора е свързана към мрежата и роторът е неподвижен, се нарича още режим на късо съединение на двигателя. При s \u003d 1 токът на двигателя е няколко пъти по-висок от номиналния, а охлаждането е много по-лошо, отколкото при номиналния режим. Следователно в режим на късо съединение асинхронен двигател, който не е проектиран да работи с плъзгачи, близки до единица, може да бъде само за няколко секунди.
Режимът на късо съединение се появява всеки път, когато двигателят се стартира, но в този случай той е краткотраен. Няколко старта на мотора с катерица подред или на кратки интервали могат да доведат до допустима температура неговите намотки и до повреда на двигателя.
3. Аналитично и графично определяне на режимите на работа на асинхронна машина
Електромеханичното преобразуване на енергия може да възникне в асинхронна машина в следните три режима:
в режим на двигател 0< s < l, Ω1 > Ω > 0;
в режим на генератор s< 0, Ω > Ω1;
в режим на спирачка s\u003e 1, Ω< 0.
Освен това са важни още два характерни режима на работа, при които не се извършва електромеханично преобразуване на енергия: идеален режим на празен ход (s \u003d 0, Ω \u003d Ω1) и режим на късо съединение (s \u003d 1, Ω \u003d 0).
В режим на двигател (зона D на фиг. 3.2), под въздействието на електромагнитния момент Μ\u003e 0, насочен към полето, роторът на машината се върти към полето със скорост, по-малка от скоростта на полето (Ω1\u003e Ω\u003e 0, 0< s < 1). В этом режиме
Ρem \u003d ΜΩ1 \u003d
\u003e 0; Ρmech \u003d ΜΩ \u003d Ρe2\u003e 0.Електрическата мощност Р1 \u003d Рem + Рm + Рэ1\u003e 0 се преобразува в механична мощност Р2 \u003d Рmech - Ρд -,\u003e 0, предавана през вала на задвижваната машина.
Енергийните процеси в режим на двигател са илюстрирани на фиг. 3.1, а, при която посоката на активния компонент на тока на ротора i2a съвпада с ЕМП, индуцирана в ротора. Посоката на електромагнитния момент Μ се определя от електромагнитната сила Bmi2a, действаща върху тока i2a.
Полезната механична мощност P2 се оказва по-малка от мощността, консумирана от мрежата от загуби ΣΡ:
Ρ2 \u003d Ρ1-ΣΡ \u003d Ρ1 - (Ρe1 + Ρm + Ρe2 + Ρd + Ρt),
А ефективността на двигателя се изразява по формулата:
\u003d 1- \u003d f (s)В режим на генератор (зона D на фиг. 3.2), под въздействието на външен момент Мw\u003e 0, насочен към полето (фиг. 3.1, b), роторът на машината се върти със скорост, надвишаваща скоростта на полето (Ω\u003e Ω1, s< 0). В этом режиме в связи с изменением направления вращения поля (Ω^) относительно ротора активная составляющая тока ротора г"2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент Μ = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М < 0), мощности Рэ„ и Ртх также отрицательны:
Ρem \u003d ΜΩ1 \u003d
< 0; Ρмех = ΜΩ = Ρэ2 < 0.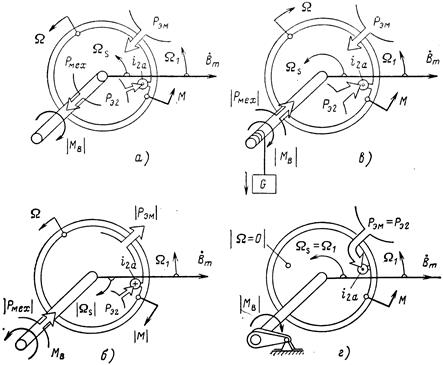
Фигура: 3.1. Режими на работа на асинхронна машина.
а - мотор;
b - генератор;
в - спирачки;
d - трансформатор (или късо съединение).
Посоката на преобразуване на енергия е обърната: механичната мощност Pg, подавана към вала на машината, се преобразува в електрическа мощност Plt, влизаща в мрежата. Тъй като загубите на мощност винаги са положителни (във всеки работен режим тези мощности се преобразуват в топлина), механичната мощност:
Ρmech \u003d Ρem - Ρe2< 0 при s < 0
в абсолютна стойност е по-голяма от електромагнитната (фиг. 3.2):
| Ρmeh | \u003d | Ем | + 2e2
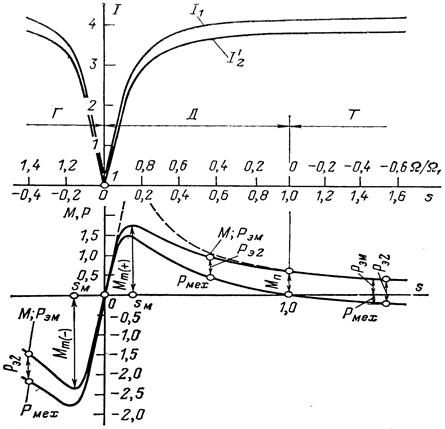
Фигура: 3.2. Електромеханични характеристики на асинхронна машина (в относителни единици при 1 / x \u003d 1; / 0 \u003d 0,364; cos<р0 = 0,185; Хг = Х"2 = 0,125; Кг = 0,0375; R"s = 0,0425).
По същата причина, механичната консумация на енергия
P2 \u003d P1 - ΣΡ< 0
в абсолютна стойност загубите са по-големи от електрическата мощност, подавана към мрежата:
| Ρ2 | \u003d | Ρ1 | + ΣΡ,
и ефективност на генератора
= 1-.В режим на спиране (зона Т на фиг. 3.2) под въздействието на външния момент Мв< 0, направленного против вращения поля (рис. 3.1, в), ротор машины вращается в сторону, противоположную полю (Ω<0, s =
\u003e 1). В този режим електромагнитният момент M, който балансира външния момент, както в моторния режим (посоката на въртене на полето Ω.5 спрямо ротора остава същата като в режима на двигателя), е насочен към полето и се счита за положителен (M\u003e 0). Въпреки това, тъй като Ω< 0, механическая мощность оказывается отрицательной:Ρmech \u003d ΜΩ \u003d Ρe2
< 0Това означава, че той се подава към асинхронна машина. Електромагнитната мощност в този режим е положителна:
Ρem \u003d ΜΩ1 \u003d
> 0Това означава, че той идва от мрежата към машината.
Машините, докарани към ротора от страна на мрежата | Ρem | и шахта | Ρmeh | мощността се преобразува в електрически загуби Pe2 в съпротивлението на ротора R "2 (фиг. 3.2):
| Ρmeh | + | Ем | \u003d Ρe2
+ E2 \u003d Ρe2 \u003d m1 R "2 (I" 2) 2.Асинхронна машина в този режим може да се използва за спиране на товара, снижен от кран. Освен това мощността | Ρmech | \u003d | ΜΩ | влиза в ротора на машината (виж фиг. 3.1).
В идеалния режим на празен ход външният въртящ момент Μw, триещият момент Μt \u003d Ρt / Ω и моментът, свързан с допълнителни загуби, Md \u003d Ρd / Ω са равни на нула. Роторът се върти със скоростта на полето (Ω \u003d Ω1, s \u003d 0) и не развива полезна механична мощност (M \u003d 0, Pmech \u003d ΜΩ \u003d 0).
В идеалния режим на празен ход външният въртящ момент, приложен към вала на машината, е нула (MV \u003d 0). Също така се счита, че няма въртящ момент на триене на въртящите се части. Роторът на машината се върти със същата ъглова скорост като въртящото се поле (Ω \u003d Ω1), приплъзването е равно на нула (s \u003d 0); ЕМП и токовете в намотката на ротора не се индуцират (I2 \u003d 0), а електромагнитният момент, който балансира външния момент и момента на силите на триене, е равен на нула (M \u003d 0).
Режимът на празен ход на индукционна машина е подобен на режима на празен ход на трансформатор. В асинхронна машина и в трансформатор токът в този режим е достъпен само в първична намотка I1 ≠ 0, а във вторичния липсва (I2 \u003d 0); в машината и в трансформатора магнитното поле се формира в този режим само от първичния ток, което прави възможно тока на празен ход да се нарече ток на намагнитване (I1 \u003d I0). За разлика от трансформатора, системата от токове I0 във фазите на многофазната намотка на статора образува въртящо се магнитно поле. \u003d -. 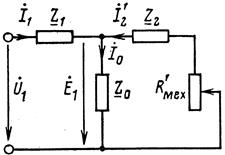
В режим на празен ход R "козина \u003d R" 2
\u003d ∞, ток R "2 \u003d 0 и еквивалентната верига съдържа само един клон Z1 + Z0 (Т-образни и L-образни вериги не се различават една от друга).В режим на късо съединение, под действието на външен момент Μ, който балансира електромагнитния момент M, роторът се поддържа неподвижен (Ω \u003d 0, s \u003d
\u003d 1) и не извършва полезна механична работа (Рmech \u003d Μ Ω \u003d 0).Посоката на тока i2a и електромагнитният момент Μ остават същите като в режима на двигателя и Μ\u003e 0 (виж фиг. 3.1, d). Електромагнитна мощност Rem \u003d ΜΩ1\u003e 0 - тя влиза в ротора от статора и се превръща в електрически загуби (Rem \u003d \u003d Re2). В този режим асинхронната машина работи като късо съединение на трансформатора от вторичната страна, като се различава от нея само по това, че има въртящо се поле на взаимна индукция вместо пулсиращо поле в трансформатора.
В режим на късо съединение R "mech \u003d R" 2
\u003d 0 и съпротивлението на еквивалентната верига на фиг. 42-3 се определя от паралелно свързани съпротивления Z1 + Z0 и Z1 + Z "2. Като се има предвид, че | Z1 + Z" 2 | «| Z1 + Z0 |, можете да изхвърлите клона Z1 + Z0 и да разгледате съпротивлението на еквивалентната верига при късо съединение, равно наZk \u003d Z1 + Z "2 \u003d Rk + jXk (43-3)
Ако към стационарния ротор на асинхронна машина е свързана симетрична система от допълнителни съпротивления R2d + jX2d, тя ще работи като трансформатор, който преобразува електрическата енергия, идваща от първичната мрежа, в електрическа енергия с други параметри, консумирани от допълнителни съпротивления R2d + jX2d. Следователно режимът при s \u003d 1 се нарича още режим на трансформатор.
Възможно е да се промени режимът на работа на асинхронна машина или приплъзването на машина в този режим (с U1 \u003d const и f1 \u003d const) само чрез промяна на външния момент MV, приложен към вала на машината. Когато Мв \u003d 0, роторът се върти със скоростта на полето (Ω \u003d Ω1, s \u003d 0) и машината не извършва полезно преобразуване на енергия. Когато външният момент Мв, насочен срещу посоката на въртене на полето, действа върху вала на ротора, скоростта на ротора намалява, докато се появи електромагнитен момент Μ \u003d f (s), който ще балансира момента Мв. Машината преминава в режим на работа на двигателя s \u003d
\u003e 0. Напротив, под въздействието на външния момент Мw на полето, насочено по дължината на въртенето, скоростта на ротора става по-голяма от скоростта на полето (Ω\u003e Ω1) и машината преминава в режим на генератор (s \u003d<0).И накрая, възможно е да се премине към режим на спиране от режим на двигателя чрез промяна на външния момент Мв по такъв начин, че роторът първо да спре и след това да започне да се върти в обратна посока (по отношение на полето).
Списък на литературата
Иванов-Смоленски А. В. Електрически машини: Учебник за университети. - М.: Енергия, 1980. - 928 с., Ил.
Voldek A.I. Електрически машини. Учебник за студенти от висше образование. Заведения. Л., "Енергия", 1974.
Проектиране на електрически машини: Учебник. За университети / Изд. И. П. Копилова. М.: По-високо. Шк., 2002. - 757 с.: Ил.
Изобретението се отнася до областта на прецизните измервателни уреди и може да се използва при производството и експлоатацията на инерционни навигационни системи на електростатични жироскопи. Същност на изобретението: според резултатите от промените в отклоненията на ротора на жироскопа при две скорости на ротора при две положения на ротора във вакуумната камера се определя номиналната скорост на ротора, при която тя става интегрално сферична (номинална скорост на въртене). Изобретението дава възможност да се намали влиянието на такива фактори като нестабилността на системите за проследяване на окачването, заряда на ротора, грешката на системите за проследяване за отписване на ъгловото положение на отклоненията на ротора на електростатичния жироскоп, което увеличава точността на жироскопа. 1 болен
Чертежи за RF патент 2269745
Изобретението се отнася до областта на прецизните прибори и може да се използва при производството и експлоатацията на инерционни навигационни системи на електростатични жироскопи (ESG) с тънкостенен ротор, чиято повърхност е направена под формата на елипсоид, удължен до полюсите.
Известен е метод за изчисляване на стойността на разликата между осите на такъв елипсоид, така че при въртене с номинална честота формата на повърхността му под действието на центробежни сили да стане сферична. Методът е описан в статията на Ю. Г. Мартиненко и В. В. Подалков „Асферизация на кухия ротор на електростатичен жироскоп“ (сборник „Жироскопия и навигация“, брой 2, 1997).
По-нататъшната работа на жироскопа се извършва при изчислената скорост на ротора. Този метод е приет като прототип на настоящото изобретение.
Недостатъкът на този метод е, че изчислението не отчита редица фактори, които влияят върху точността на определяне на скоростта на ротора, при която той е нечувствителен към промени в пондеромоторните сили. Тези фактори включват:
Разпространението на параметрите на роторния материал (плътност, модул на еластичност и др.), Включени в изчислителните формули;
Диапазон на толерантност за производство на ротор;
Влиянието на висшите хармоници на формата на повърхността на ротора върху точността на ESG.
Всички тези фактори намаляват потенциалната точност на ESG, тъй като несъвпадението на формата на роторната повърхност със сферата води до появата на момент от действието на пондеромоторни сили, насочени по нормала към повърхността и, следователно, до появата на отклонения на жироскопа.
Известно е (монография на Ю.Г. Мартиненко "Движение на твърдо тяло в електрическо и магнитно поле", Москва, "Наука", 1998), че при линейно преместване на несферичния ротор на ESG спрямо окачващите електроди, скоростта му на бягство се променя поради преразпределението на пондеромоторните сили над повърхността. Ако при линейно преместване на ротора няма промяна в скоростта на изтичане, трябва да се приеме, че ESG е инвариант към промяна в пондеромоторните сили, т.е. роторът на такъв ESG е интегрално сферичен.
Целта на настоящото изобретение е да се определи скоростта на ротора, при която той става интегрално сферичен (номинална скорост), което намалява моментите на задвижване от пондеромоторните сили и следователно увеличава точността на жироскопа.
Задачата се решава чрез последователност от операции:
1. ESG е инсталиран в устройство, което ви позволява да определите скоростта на дрейфа на ротора (например в жиро-ориентатор), така че оста на въртене на ротора да е в равнината на екватора на Земята.
2. Роторът се претегля във вакуумна камера с помощта на система за пространствено окачване и се ускорява до проектната скорост f 1.
3. Устройството, в което е инсталиран ESG, е пуснато в експлоатация.
4. Определете скоростта на излизане на ротора n 11 според натрупания ъгъл в равнината на земния екватор.
5. Роторът се измества във вакуумната камера по оста, разположена по оста на въртене на ротора чрез въвеждане на допълнително електрическо напрежение към входа на проследяващата координатна система на окачването по тази ос.
6. Определете скоростта на отклонение на ротора n 12.
7. Ускорете ротора до скорост на въртене f 2.
8. Определете скоростта на отклонение на ротора n 21.
9. Освободете допълнителното електрическо напрежение.
10. Определете скоростта на отклонение на ротора n 22.
11. Изчислете номиналната скорост на ротора, при която тя става интегрално сферична, съгласно формулата:
12. Доведете скоростта на ротора до номиналната скорост.
Извеждането на формулата е илюстрирано с чертеж, където е посочено:
f 1 - прогнозна скорост на ротора;
f 2 - скорост на ротора след ускорение (забавяне);
f n е скоростта на ротора, при която той става интегрално сферичен;
A, B, C, D, E - върхове на триъгълници;
(n 12 -n 11) е разликата в скоростите на ротора, напускащ след и преди линейното изместване при скоростта на ротора f 1;
(n 22 -n 21) е разликата в скоростите на ротора, напускащ след и преди линейното изместване при скорост на ротора f 2.
От сходството на триъгълниците ABD и ACE:
Решавайки тази пропорция, получаваме горната формула.
В предприятието ЦНИИ "Електроприбор" е внедрено предложеното техническо решение.
ESG е инсталиран в двуосен жиростабилизатор, ESG роторът се претегля във вакуумна камера с помощта на триаксиална система за проследяване, завърта се до проектната скорост (f 1), определена от проектната документация, с помощта на амортисьорна намотка, оста на ротора се настройва в равнината на земния екватор. След това се включват проследяващите системи на кардановите пръстени, наблюдава се движение на ротора и скоростта на отклонение при проектната скорост (n 11) се определя от натрупания ъгъл. След това роторът се измества по оста на въртене, с помощта на допълнително електрическо напрежение, въведено в координатата на системата за проследяване на окачването на ротора, което контролира неговото линейно движение по оста на въртене и скоростта на дрейфа отново се определя при проектната скорост на въртене (n 12).
При следващата операция роторът се ускорява до скорост, по-висока от изчислената (f 2), скоростта на отклонение на ротора (n 21) се измерва с честота, по-висока от изчислената, след което допълнителното електрическо напрежение се отстранява и скоростта на отклонение на ротора (n 22) се определя отново.
Съгласно формулата (1) се намира номиналната скорост на ротора (f n) и скоростта на ротора се довежда до номиналната (f n).
Внедряването на този метод в Централния изследователски институт "Електроприбор" увеличи точността на ESG с 3-5 пъти.
Техническата и икономическа ефективност на изобретението е да се подобри точността на ESG.
Поради липсата на информация за нуждите на страната от броя на такива жироскопи, не е възможно да се изчисли икономическият ефект от изобретението.
ИСК
Метод за определяне на номиналната скорост на въртене на ротора на електростатичен жироскоп, съдържащ тънкостенен ротор, чиято външна повърхност е направена под формата на елипсоид на въртене, удължен до полюсите с изчислена стойност на разликата между осите на елипсоида, който се състои в това, че електростатичният жироскоп е инсталиран в устройство, което ви позволява да определяте скоростта на ротора оста на въртене на ротора се задава в равнината на земния екватор, роторът се претегля във вакуумна камера с помощта на система за пространствено проследяване на окачването, роторът се ускорява до проектната скорост f 1, след привеждане на устройството, в което е инсталиран жироскопът, скоростта на излитане n 11 се определя в режим на работа според ъгъл в равнината на земния екватор, характеризиращ се с това, че роторът се измества по посока на оста на въртене чрез въвеждане на допълнително електрическо напрежение към входа на проследяващата система; координати на окачването, разположени по оста на въртене на ротора, скоростта на излизане на ротора n 12, ускорете ротора до скоростта на въртене f 2, измерете скоростта на изтегляне n 21, премахнете допълнителното електрическо напрежение, измерете скоростта на изтегляне на ротора n 22, определете номиналната скорост на ротора по формулата
и доведете скоростта на ротора до номиналната.