Trofazni asinkroni motor
Izravna veza s mrežom povezana je s udarnim strujama u krugu statora. To je dobro poznata činjenica. Ali nisu svi razmišljali o razlogu ove pojave. Navikli smo na činjenicu da je struja bilo kojeg elektromotora izravno proporcionalna momentu na vratilu. I ovdje je, čini se, paradoksalna situacija: okretni moment motora tijekom pokretanja je ograničen, a struja može premašiti nominalnu vrijednost sedam puta. Kako se to događa?
Sve je u fizici rada asinkroni stroj... Izmjenično elektromagnetsko polje statora inducira EMF u namotu rotora motora. Vrijednost ovog EMF-a, u skladu sa zakonima elektromagnetska indukcija, ovisi o brzini promjene elektro magnetsko polje statora, odnosno na frekvenciji rotacije ovog polja u odnosu na rotor (od klizanja).
Ali ako se polje statora počne okretati odmah nakon podnošenja napona, tada rotoru treba neko vrijeme da se ubrza. A što je motor snažniji i veći, to je rotoru potrebno ubrzanje - povećana masa potiče inerciju.
Vrijednost klizanja, pak, ima najviše veliku važnost točno u prvom trenutku lansiranja. U ovom je trenutku klizanje jednako jedinici, rotor još uvijek miruje, a polje se već okreće maksimalnom brzinom. EMF u krugu rotora doseže svoju maksimalnu vrijednost, kao i struja rotora.
Struja rotora je također promjenjiva, pa stvara i vlastito promjenljivo elektromagnetsko polje. Ovo polje ponovno inducira EMF već u krugu statora motora. I pod utjecajem gore spomenutog EMF-a, dodatna komponenta struje počinje teći u statoru, nadoknađujući MDF rotora.
Dakle, struja statora uvijek je zbroj dviju jednosmjernih komponenata. Vrijednost jedne komponente posljedica je unutarnjeg otpora namota statora. Ova komponenta ima konstantnu vrijednost i pri idealnom praznom hodu motora cijela struja statora smanjuje se samo na nju.
A druga komponenta struje statora ovisi o struji u krugu rotora i doseže svoj maksimum u prvom trenutku pokretanja motora, smanjujući se na nulu kako se približava točki idealnog praznog hoda. Zbog druge komponente, struja statora motora doseže tako velike vrijednosti prilikom pokretanja.
Nejasna ostaje samo jedna nijansa: zašto polazna struja asinkroni motor ne osigurava tako veliki startni moment kao što je slučaj kod motora istosmjerna struja? Razlog je taj što moment momenta motora stvara samo aktivna komponenta struje rotora, odnosno komponenta koja je u fazi s EMF rotora.
A omjer aktivne i reaktivne struje rotora ovisi, prije svega, o frekvenciji EMF-a induciranog u namotu rotora. Što je frekvencija veća, struja postaje "promjenjivija" i to više veća važnost stječe induktivni otpor namotaja rotora. I što je veći induktivni otpor namota rotora, struja rotora postaje reaktivnija.
Da, početna struja u krugu rotora asinhronog motora je velika, ali uglavnom je reaktivna, ne može pružiti veliki elektromehanički moment. Aktivna struja doseže potrebnu vrijednost tek nakon što se EMF frekvencija smanji i motor dostigne svoje radne karakteristike. To je razlog dva problema pokretanja asinkronih motora: ograničenog momenta pokretanja i, naprotiv, nekoliko puta veće struje startnog statora.
Maksimalna frekvencija EMR rotora doseže točno u trenutku pokretanja, kada rotor miruje. U ovom se trenutku EMR rotora mijenja s frekvencijom opskrbne mreže - 50 herca. Nakon toga, kada motor dosegne radni dio karakteristike, ta frekvencija pada na nekoliko herca, a induktivni otpor namota prestaje biti važan i struja rotora postaje gotovo potpuno aktivna.
FEDERALNA AGENCIJA ZA OBRAZOVANJE
"MATI" - RUSKA DRŽAVA
TEHNOLOŠKO SVEUČILIŠTE
IH. K.E. TSIOLKOVSKY
Odjel "Elektronika i informatika"
TROFAZNI ASINHRONI MOTORI
Metodičke upute za laboratorijski rad po stopi:
"Elektronika i elektrotehnika"
Sastavio A.L.Marchenko
MOSKVA 2005
CILJ DJELA
Ukloniti i izraditi mehaničke i izvedbene karakteristike trofaznog asinkronog motora (AM); proučiti modele krvnog tlaka i istražiti njihov rad u privremenim režimima.
TEORIJSKE ODREDBE I OBRAČUNSKI OBRASCI
1. UREĐAJ I NAČELO DJELOVANJA PAKLA
Trofazni asinkroni motori najviše se koriste u industriji (slika 19.1). To je zbog činjenice da su jednostavnog dizajna, jeftini, pouzdani u radu, imaju visoku učinkovitost pri nazivnom opterećenju, podnose značajna preopterećenja i ne zahtijevaju složene uređaje za pokretanje.
H  uz prednosti krvnog tlaka, imaju i niz nedostataka, od kojih su glavni: faktor male snage (cos
) pri djelomičnom opterećenju (pri praznom hodu cos
0
\u003d 0,2 ... 0,3); niska učinkovitost pri malim opterećenjima; nezadovoljavajuće regulacijske karakteristike.
uz prednosti krvnog tlaka, imaju i niz nedostataka, od kojih su glavni: faktor male snage (cos
) pri djelomičnom opterećenju (pri praznom hodu cos
0
\u003d 0,2 ... 0,3); niska učinkovitost pri malim opterećenjima; nezadovoljavajuće regulacijske karakteristike.
OKO 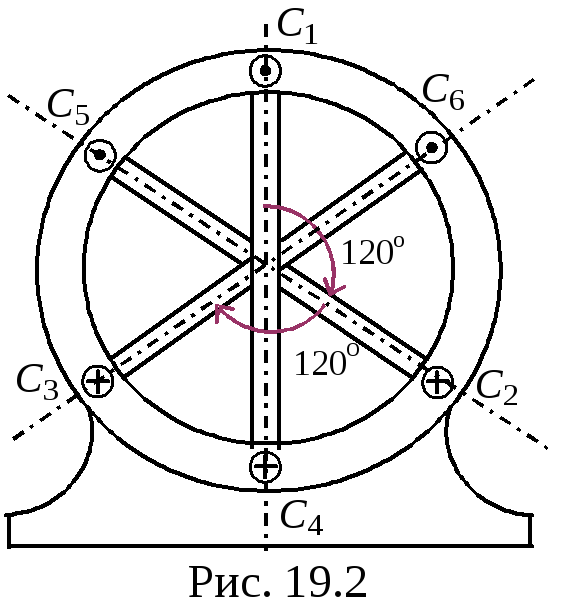 glavni dijelovi AM su stator i rotor koji su međusobno udaljeni zračnim razmakom (0,3 ... 0,5 mm). Njihove jezgre su sastavljene od čeličnih limova. Na unutarnjem dijelu površine statora i na vanjskom rotoru utisnuti su žljebovi u koje su položeni namoti. Jezgra statora smještena je u kućište na kojem su pričvršćene stezaljke namota statora, koje se sastoje od tri neovisna namota, pomaknuta u prostoru za 120 (slika 19.2). Jezgra rotora postavljena je izravno na osovinu motora ili na glavčinu navučenu preko osovine.
glavni dijelovi AM su stator i rotor koji su međusobno udaljeni zračnim razmakom (0,3 ... 0,5 mm). Njihove jezgre su sastavljene od čeličnih limova. Na unutarnjem dijelu površine statora i na vanjskom rotoru utisnuti su žljebovi u koje su položeni namoti. Jezgra statora smještena je u kućište na kojem su pričvršćene stezaljke namota statora, koje se sastoje od tri neovisna namota, pomaknuta u prostoru za 120 (slika 19.2). Jezgra rotora postavljena je izravno na osovinu motora ili na glavčinu navučenu preko osovine.
Namot rotora može biti kratko spojen ili trofazan sličan namotu statora. Kratko spojeni namot rotora izrađen je u obliku "vjevericinog kotača", koji se sastoji od šipki i zatvara ih na krajevima prstenova (slika 19.3, i i b). U PAKLU s fazni rotor (vidi sl. 19.1, u) neki krajevi o 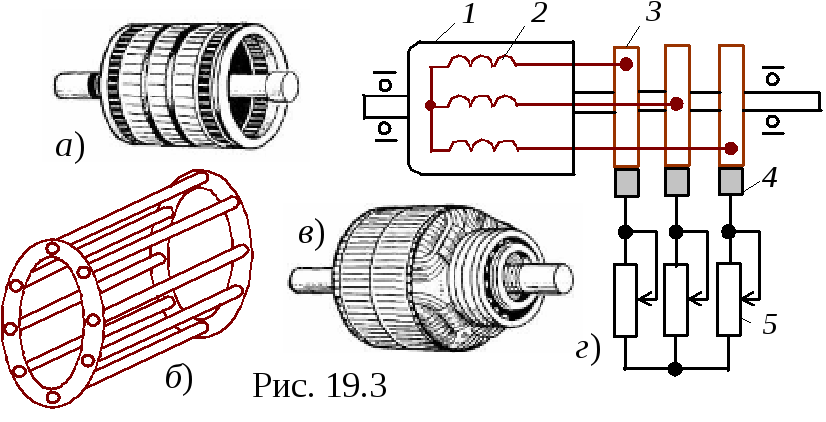 kolut 2
rotor 1
povezati kliznim prstenima 3
smješteni na osovini motora, dok su ostali povezani u zvijezdu (slika 19.3, u i r). Klizni prstenovi 3
spojeni su na kontakte nepokretnog dijela stroja pomoću četkica 4
i držači četkica. Na njih je povezan početni reostat 5.
kolut 2
rotor 1
povezati kliznim prstenima 3
smješteni na osovini motora, dok su ostali povezani u zvijezdu (slika 19.3, u i r). Klizni prstenovi 3
spojeni su na kontakte nepokretnog dijela stroja pomoću četkica 4
i držači četkica. Na njih je povezan početni reostat 5.
Načelo rada IM temelji se na interakciji rotirajućeg magnetskog polja statora (stacionarni dio stroja) sa strujama induciranim u rotoru (pokretni dio).
Razmotrite princip stvaranja magnetskog polja stroja. Trofazni namot statora napaja se trofaznim naponskim sustavom (vidi sl. 19.1, i) s faznim naponima U 1 f ... Budući da su tri fazna namota (pomaknuta u prostoru jedan u odnosu na drugi za 120 (sl. 19.2) i imaju broj zavoja w 1) su zatvoreni, pa u njima teku struje ja 1, kao rezultat toga, kreiraju se tri MDS-a F 1 = ja 1 w jedan . Pod djelovanjem ta tri MDS-a nastaje rotirajuće magnetsko polje čiji je rezultirajući vektor magnetskog toka F r = 3/2F m gdje F m - magnetski tok stvoren fazom MDS F 1 .
Prema zakonu elektromagnetske indukcije, EMF se inducira u namotima statora i rotora e 1 i e 2. Krug namotaja rotora uvijek je zatvoren, pa struje teku u faznim namotima rotora ja 2, čije vrijednosti ovise o opterećenju. Prema Ampereovom zakonu, iz interakcije struja rotora s rotirajućim magnetskim poljem statora nastaje moment na osovini motora M, i ako je to više od trenutka otpora M iz na osovini, rotor se počinje okretati. Prema Lenzovom pravilu, rotorske struje poput rotirajućeg magnetskog polja koje stvaraju utječu na struje statorskih namota i magnetski tok F r stroj, uzrokujući povećanje struje statora kako bi se nadoknadio učinak razmagnetivanja struja u namotu rotora.
Učestalost rotacijskog magnetskog polja statora (u okr / min) određuje se izrazom:  gdje f 1
- frekvencija mrežnog napona koji napaja motor; r - broj parova polova stroja (posebno tri namota statora stvaraju jedan par polova, šest namotaja dva para itd.).
gdje f 1
- frekvencija mrežnog napona koji napaja motor; r - broj parova polova stroja (posebno tri namota statora stvaraju jedan par polova, šest namotaja dva para itd.).
Dotični stroj naziva se asinkroni jer ima brzinu rotora n 2 nije jednaka frekvenciji rotacijskog magnetskog polja statora n jedan . Da su te frekvencije jednake, tada bi magnetski tok statora bio stacionaran u odnosu na rotirajući rotor, a EMF ne bi bio induciran u namotima rotora, u njima ne bi bilo struje i ne bi bio okretni moment na osovini.
Razlika između frekvencija rotacije polja statora i rotora naziva se frekvencija klizanja n s \u003d n 1 - n 2, i njegov omjer prema učestalosti n 1 - klizanjem S, tj.
 ili (izraženo u postocima)
ili (izraženo u postocima) 
Raspon promjene klizanja u asinkronom motoru 1 S 0; pri pokretanju S \u003d 1, za besposlen S \u003d 0,001 ... 0,005, pri nazivnom opterećenju S = 0,03...0,07.
2. GLAVNE KARAKTERISTIKE PAKLA
Jedna od glavnih karakteristika krvnog tlaka je mehanička karakteristika n 2 = f(M) - ovisnost brzine n 2 od trenutka M na osovini motora (sl. 19.4). Prirodna mehanička karakteristika 1 (vidi slike 19.4 i sl. 19.5) asinkronog motora opisuje se jednadžbom
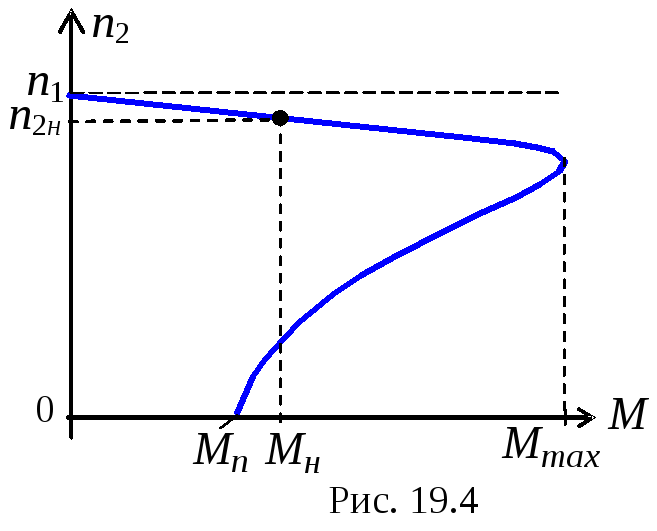
S povećanjem opterećenja na osovini, klizanje S povećava, a brzina rotora smanjuje se za 5 ... 10%, tj. mehanička karakteristika n= ¦ ( M) PAKAO je teško (vidi sliku 19.4);
Promjena smjera rotacije IM rotora - unatrag - provodi se prebacivanjem bilo koje dvije žice trofaznog sustava koji napaja motor.
AM moment je proporcionalan kvadratu faznog napona U 1 f mreža i ovisi o klizanju S, tj.
gdje m 1 - broj faza statora; x DO
=
x 1
+ ;
R 1 ,
x 1 i
;
R 1 ,
x 1 i  ,- aktivni, induktivni otpor namota statora i smanjeni otpori namota rotora.
,- aktivni, induktivni otpor namota statora i smanjeni otpori namota rotora.
S porastom trenutka otpora M iz klizanje se povećava na osovini, što dovodi do povećanja obrtnog momenta do vrijednosti M iz ... Klizno mjesto pri kojem moment postiže maksimalnu vrijednost M maks , naziva se kritičnim i nalazi se prema izrazu S cr /x DO .
Kritične vrijednosti klizanja S cr i početni moment M str ovise o otporu kruga rotora (vidi krivulje 2
…4
na sl. 19.5) i trenutak M str raste s porastom  dosezanje M maks na +
dosezanje M maks na +
x DO gdje je smanjeni otpor startnog reostata koji se koristi u IM s faznim rotorom za smanjenje startne struje, povećanje početnog momenta (vidi krivulju 4
na sl. 19,5, b), osiguravajući nesmetano pokretanje i regulaciju brzine rotora (vidi reostatske mehaničke značajke 2
…4
na sl. 19,5, b).
x DO gdje je smanjeni otpor startnog reostata koji se koristi u IM s faznim rotorom za smanjenje startne struje, povećanje početnog momenta (vidi krivulju 4
na sl. 19,5, b), osiguravajući nesmetano pokretanje i regulaciju brzine rotora (vidi reostatske mehaničke značajke 2
…4
na sl. 19,5, b).
3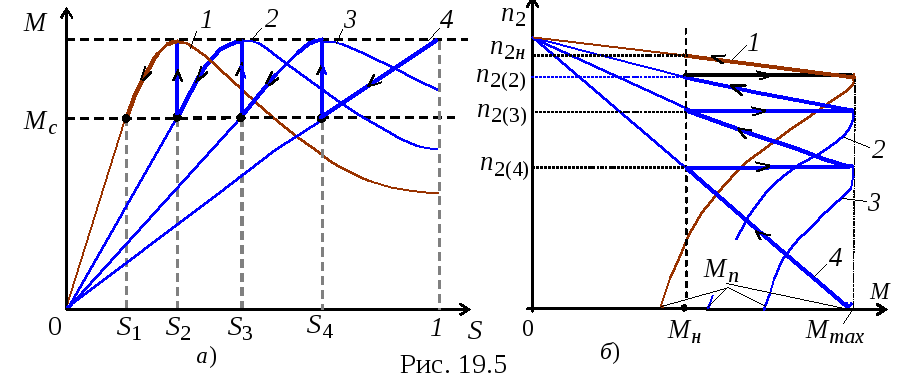 ... POSLOVNE KARAKTERISTIKE PAKLA
... POSLOVNE KARAKTERISTIKE PAKLA
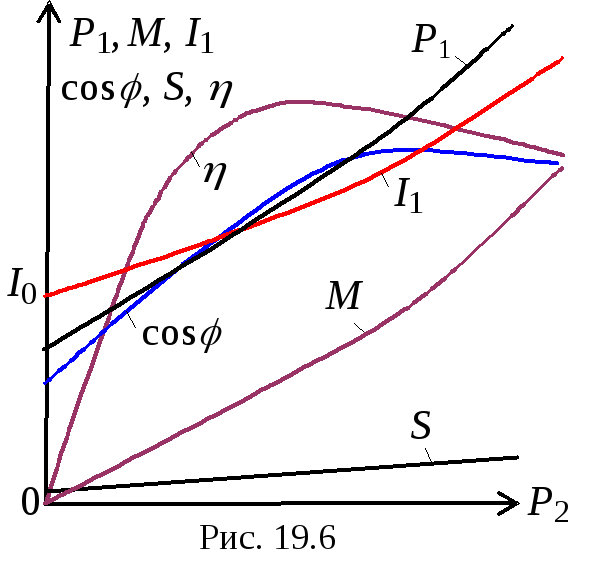 Učinak asinhronog motora može se procijeniti pomoću njegovih krivulja izvedbe, koje grafički predstavljaju neto snagu. R 2 količine: struja Ja 1 u namotu statora, učinkovitost
, skliznuti S, faktor snage cos
,
koristan trenutak M
na BP vratilu na U 1
=
konst
i f 1
=
konst (sl. 19.6). Određuju se eksperimentalno ili proračunom pomoću ekvivalentnog kruga asinhronog motora.
Učinak asinhronog motora može se procijeniti pomoću njegovih krivulja izvedbe, koje grafički predstavljaju neto snagu. R 2 količine: struja Ja 1 u namotu statora, učinkovitost
, skliznuti S, faktor snage cos
,
koristan trenutak M
na BP vratilu na U 1
=
konst
i f 1
=
konst (sl. 19.6). Određuju se eksperimentalno ili proračunom pomoću ekvivalentnog kruga asinhronog motora.
Snaga praznog hoda R 2 \u003d 0; dok struje statorskih namota Ja 0, koje stvaraju rotacijsko magnetsko polje, prilično su velike i iznose 30 ... 50% nazivnih struja Ja 1 n ... Brzina rotora n 20 = = (0,995…0,998) n 1 .
Kako se rasterećuje osovina, povećava se struja statora, kao i aktivna snaga R 2 i R jedan . Zauzvrat, faktor snage se povećava  ... U ovom slučaju, klizanje S povećava se, a brzina osovine n 2 smanjuje jer je to jedini razlog povećanja struje i elektromagnetskog momenta.
... U ovom slučaju, klizanje S povećava se, a brzina osovine n 2 smanjuje jer je to jedini razlog povećanja struje i elektromagnetskog momenta.
Ovisnost M = f(R 2) određuje se formulom M = 9550R 2 /n 2, iz čega proizlazi da je ta ovisnost blago zakrivljena ravna crta koja prolazi kroz ishodište koordinata, jer se s porastom opterećenja na osovini učestalost rotacije IM rotora blago smanjuje.
Priroda ovisnosti faktora snage IM o snazi \u200b\u200bosovine, tj. Cos
=
f(R 2), određuje se izrazom cos
\u003d P 1 / i jednak je 0,8 ... 0,89 za normalnu prosječnu snagu IM pri nazivnom opterećenju. Sa smanjenjem opterećenja na osovini cos
opada i doseže vrijednosti 0,2 ... 0,3 u praznom hodu. U ovom je načinu neto snaga na osovini jednaka nuli, ali motor troši energiju iz mreže, dakle cos
0
ovdje nije jednako nuli.
i jednak je 0,8 ... 0,89 za normalnu prosječnu snagu IM pri nazivnom opterećenju. Sa smanjenjem opterećenja na osovini cos
opada i doseže vrijednosti 0,2 ... 0,3 u praznom hodu. U ovom je načinu neto snaga na osovini jednaka nuli, ali motor troši energiju iz mreže, dakle cos
0
ovdje nije jednako nuli.
Koeficijentna karakteristika korisno djelovanje h = f(R 2) Krvni tlak raste vrlo brzo s nule (u praznom hodu) na 0,4 ... 0,5 nazivnog opterećenja i doseže najvišu vrijednost (0,85 ... 0,95.) U rasponu od 0,7 do 0,8 nazivnog opterećenja, a zatim polako pada zbog povećanja promjenjivih gubitaka (vidi sliku 19.6).
4. KRATAK OPIS MODELA PAKLA
ZADACI I METODOLOŠKE UPUTE NJIH
PROVEDBA
Zadatak 1. Upoznajte se sa sučeljem IM testnog modela (slika 19.7), navodeći svrhu prozora (polja), uključujući one koji imaju strelice za promjenu, na primjer, trenutka otpora na osovini, otpora početnog reostata, izbor sheme spajanja namota statora, a također i prozori izlaznih veličina koji simuliraju očitanja mjernih instrumenata.
Prema opciji N odaberite vrstu motora (za neparne varijante iz tablice 1, AM s rotorom s vjevericom, a za parne - iz tablice 2, AM s faznim rotorom, gdje N - podudara se s brojem upisa prezimena studenta u časopisu za studij grupe), u izvještaj zapišite njegove nominalne podatke: nominalna mehanička snaga R n = R 2 n na osovini, mrežni napon U n i njegova učestalost f 1, nazivna struja Ja n , nazivna frekvencija rotacija osovine n n , Učinkovitost n , nazivni faktor snage cos n , broj parova polova r rotirajuće magnetsko polje statora.
Zadatak 2. Izvršiti "pokretanje" krvnog tlaka (pokrenuti program za modeliranje i izračunavanje parametara krvnog tlaka) i "ukloniti" mehaničke i radne karakteristike krvnog tlaka. Do kraja:
Kliknite gumb "Start", odnosno "spojite" namot statora AM trofazna mreža izmjeničnu struju i upišite u redak 1 tablice. Vrijednosti napona u mreži 19,1 U 1, struja linije Ja 1, aktivna snaga R 1, "potrošeno" PAKLO iz mreže, brzina rotora n 2 u praznom hodu (korisni moment na vratilu M \u003d 0), koji su prikazani u odgovarajućim poljima na zaslonu zaslona;
- "ukloniti" mehanički n 2 = f(M) i radnici Ja 1 = f(R 2), jer = f(R 2), S = f(R 2), R 1 = f(R 2), M= f(R 2), h = f(R 2) karakteristike motora.
Da biste uklonili karakteristike, morate:
Kliknite gumb "Load On" koji se nalazi na dnu radnog polja IM modela, tj. "Spojite" krug namota polja elektromagnetske kočnice na mrežu;
Postupno povećanje trenutka otpora (opterećenja) M na osovinu BP zapišite u tablicu. 19.1 indikacije "mjernih uređaja" pri 8 ... 9 trenutnim vrijednostima M: iz načina mirovanja ( M = 0, R 2 \u003d 0) na vrijednost M = (1,2...1,5)M n ili R 2 = (1,2...1,5)R 2 n .
Tablica 19.1
|
mjerenja |
Rezultati mjerenja |
Rezultati proračuna |
|||||||
Promatranja promjene opterećenja na vratilu mogu se provoditi i vrijednostima trenutka Mi vrijednosti snage R 1 konzumira HELL s mreže. Na primjer, za asinkroni motor s parametrima: R 2 n \u003d 0,55 kW, h n = 0,705 i R 1 n = R 2 n /h n \u003d 0,55 / 0,705 \u003d 0,78 kW promjene snage bit će od R 0 (praznog hoda) do R 1 \u003d 1,1 ... 1,15 kW.
Zadatak 3. Prema podacima procesa modeliranja u IM izračunajte korisnu snagu Str 2 na osovini, klizna S, faktor snage cos i efikasnost h motor pri različitim opterećenjima, koristeći sljedeće proračunske formule:
 \u003d P 2 /R jedan ; cos
\u003d P 1 /
\u003d P 2 /R jedan ; cos
\u003d P 1 / ,
,
Trofazni asinkroni motori s kaveznim rotorom široko se koriste u raznim sektorima nacionalne ekonomije. Nemaju klizne kontakte, jednostavni su u dizajnu i održavanju. Eksplodirani kavezni motor prikazan je na sl. 1. Njegovi su glavni dijelovi stator i rotor. Jezgre statora i rotora izrađene su od električnih čeličnih limova.
U žljebove jezgre statora položi se i učvrsti trofazni namot, koji je ovisno o naponu opskrbne mreže i podacima motora povezan zvijezdom ili trokutom. Stezaljke namota statora su označene, što olakšava sastavljanje željenog dijagrama povezivanja.
U skladu s GOST 183-74 *, usvajaju se sljedeće oznake zaključaka namota pojedinih faza, odnosno početak i kraj prve faze C1 i C4, druge - C2 i C5 i treće - SZ i C6 (slika 2). Raspored stezaljki na priključnoj kutiji motora mora udovoljavati zahtjevu za lako spajanje namota prema bilo kojoj shemi. Namot rotora nije izoliran od svoje jezgre. Zajedno s ventilacijskim lopaticama lijeva se od aluminija ili njegovih legura. Šipke za navijanje i kratko spojeni prstenovi tvore takozvani kavez vjeverica.
Dizajn motora ovisi o načinu ventilacije i stupnju zaštite.
Asinhroni kavezni motori jedne serije 4A metodom hlađenja i stupnjem zaštite osoblja od kontakta s dijelovima pod naponom ili rotirajućim dijelovima, kao i sam stroj od ulaska stranih tijela u njega, imaju dvije verzije (GOST 14254-80 ): zatvoreno puhano (oznaka IP44), zaštićeno (oznaka IP23).
Motori s dizajnom IP44 imaju aksijalni sustav ventilacije. Zrak se dovodi ventilatorom i puše oko vanjske rebraste površine kreveta.
Za motore IP23 karakterističan je dvostrani radijalni ventilacijski sustav koji se provodi pomoću ventilacijskih lopatica smještenih na kratko spojenim rotorskim prstenima.
Lik: 1 Rastavljeni asinkroni motor s vjevericama
1 - stator, 2 - priključna kutija, 3 - rotor, 4 - krajnji štitovi, 5 - ventilator, 6 - kućište ventilatora
Motori ove serije imaju sljedeću strukturu oznaka: 4 - serijski broj serije; A - naziv vrste motora - asinkroni; A - okvir i štitovi izrađeni od aluminija; X - aluminijski okvir i štitovi od lijevanog željeza; 56-355 - visina osi rotacije; S, L, M - dimenzije ugradnje duž duljine tijela; A, B - oznaka duljine jezgre (prva dužina je A, druga je B); 2, 4, 6, 8, 10, 12 - broj polova; U - klimatska izmjena motora; 3 - kategorija plasmana. Na primjer: 4AA56A2UZ - elektromotor serije 4, asinkroni zatvoreni dizajn, okvir i krajnji štitovi izrađeni od aluminija, s visinom osi rotacije 56 mm, jezgra prve duljine, dvopolna, za područja umjerene klime, položaj kategorija 3.
Slika 2 Položaj stezaljki na štitniku motora kada su spojeni: a - zvijezda; b - trokut 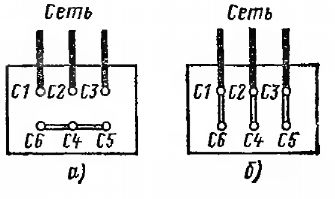
stol 1
tip motora |
Nazivna snaga, kW |
||
n \u003d 3000 o / min |
|||
n \u003d 1500 o / min |
|||
n \u003d 1000 o / min |
|||
Nastavak tablice. jedan
tip motora |
Nazivna snaga, kW |
||
Glavni tehnički podaci motora male snage serije 4A dati su u tablici. jedan.
Razvijena je i proizvedena jedna serija AI asinkronih motora. Poboljšanje karakteristika energije, pokretanja i vibracija buke strojeva ove serije postiže se primjenom novih materijala i dizajnerskih rješenja.
Glavni tehnički podaci motora male snage iz serije AI dati su u tablici. 2.
Trofazna struja koja prolazi kroz namote statora stvara rotirajuće magnetsko polje. Učestalost rotacije polja n naziva se sinkronom. Ovisi o frekvenciji fi napona napajanja i broju parova polova p stroja: ![]()
a pri f 1-50 Hz poprima vrijednosti: 3000 o / min (p- \u003d\u003d 1), 1500 o / min (p \u003d 2), 1000 o / min (p \u003d 3) itd.
Za frekvenciju mrežnog napona imat ćemo: 
Rotor asinhronog motora, rotirajući u smjeru rotacije polja, razvija frekvenciju nešto nižu od sinkrone, koja se naziva asinkronom.
tablica 2
tip motora |
Nazivna snaga, kW |
Frekvencija sinkrone rotacije, r / w<н |
||
AIR80A2-OM2 |
||||
AIR80V4-OM2 |
||||
AIR80A6-OM2 |
||||
AIR80V6-OM2 |
||||
Zaostajanje rotora karakterizira proklizavanje. Ako se brzina rotora označi s ri2, tada odnos klizanja poprima oblik 
ili, %, 
Iz (2) proizlazi da se klizanje asinhronog motora mijenja od jedinice (pri pokretanju, kada je n2-0) do nule (kod sinkrone brzine, tj. Kada je P2-P1). Imajte na umu da se u motornom načinu rada ne postiže točna jednakost frekvencije vrtnje polja i rotora. Međutim, zaostajanje rotora u praznom hodu stroja je toliko malo da se može zanemariti. Vrijednosti klizanja pri punom opterećenju motora obično su 4-6%.
Izraz za brzinu rotora može se dobiti iz odnosa (2):
Imajte na umu da brojnik desne strane jednakosti (2) ima određeno fizičko značenje. Razlika između brzine rotacije polja i rotora je relativna brzina rotacije, tj. Brzina rotacije polja u odnosu na rotor ns, ili frekvencija klizanja.
Primjer. Poznato „1 \u003d 1000 okretaja / mn, s \u003d 4%. Izračunajte brzinu rotora i relativnu brzinu.
Imamo: la \u003d 1000 (1-0,04) \u003d 960 o / min, ns \u003d nl-n2 \u003d 1000-960 \u003d \u003d 40 o / min.
Frekvencija EMF-a i struja induciranih u namotu rotora rotacijskim magnetskim poljem određuje se frekvencijom klizanja: 
Jednostavnim transformacijama ovaj se izraz svodi na oblik
oni. frekvencija EMF i struje rotora pod uvjetom ft - const proporcionalna je klizanju.
Primjer. Pronađite frekvenciju struje rotora za prethodni primjer.
Imamo - / 2 \u003d / lS \u003d 50-0.04 \u003d 2 Hz.
Snaga koju generira motor proporcionalna je klizanju unutar normalnih opterećenja. Stoga se opterećenje stroja može procijeniti po klizanju. ![]()
Upotreba snage motora tijekom njegovog rada može biti različita. Faktor iskorištenja snage ![]()
gdje je Pg korisna snaga pri proizvoljnom opterećenju; Rnom - nazivna snaga, tj. Neto snaga za koju je električni stroj dizajniran.
Nazivna snaga odgovara nazivnom naponu. Motor istodobno troši nazivna struja, koji imaju nominalne vrijednosti brzine, snage vratila, učinkovitosti i cos φ.
Svrha motora je pretvoriti električnu energiju u mehaničku. Tijekom postupka pretvorbe nastaju gubici. Oni predstavljaju dio aktivne snage koji se troši na zagrijavanje namota, čelika jezgre statora i prevladavanje sila trenja.
Odnos korisne snage P2, koju razvija motor na osovini, prema aktivnoj snazi \u200b\u200bP \\, koju troši iz mreže, naziva se učinkovitost: ![]()
Uz aktivni, motor troši i reaktivnu snagu magnetiziranja potrebnu za stvaranje magnetskog toka. Dakle, ukupna snaga motora 5 sastoji se od aktivnih i reaktivnih komponenata: 
gdje je Q reaktivna snaga motora.
Relativna vrijednost pretvorene snage procjenjuje se prema faktoru snage. Što se bolje koristi snaga stroja, to je veći faktor snage. Da bi se izračunao, dovoljno je podijeliti aktivnu snagu sa ukupnim: 
gdje U, I - fazne vrijednosti napona i struje.
Primjer. Na štitniku trofaznog asinkronog motora s rotorom s vjevericama nalaze se sljedeće oznake: D "A. 220 /
380 V, 10,5 / 6,1 A, 2,8 kW, 50 Hz, 2880 o / min, CDD \u003d 81,5%, cos 
(u ovom slučaju je jednako 3000 o / min), tada će klizanje pri nazivnom opterećenju biti:
Puna snaga motora pri nazivnom opterećenju SHom \u003d 3l / nom / nom \u003d 3-220-6,1 "4000 VA \u003d 4 kV-A.
Aktivna snaga koju motor troši pri nazivnom opterećenju,
Rxnom \u003d 31 / nom / nom "" F, nom \u003d 3-220-6,1-0,86 \u003d 3,44 kW.
Gubici motora pri nazivnom opterećenju
2DRish \u003d Rtsh - P2 \u003d 3,44 - 2,8 \u003d 0,64 kW.
Upotreba podataka iz tablice. 1 prikazuje krivulje ovisnosti faktora snage motora o njihovoj nazivnoj snazi \u200b\u200b(slika 3).
Krivulja 1 odgovara sinkronoj brzini od 3000 o / min, od 2 do 1500 o / min i od 3 do 1000 o / min. Sl. 3 može se vidjeti da faktor snage asinhronog motora ovisi o nazivnoj snazi \u200b\u200bi sinkronoj brzini.
S porastom snage pri konstantnoj sinkronoj brzini ("! \u003d Const), relativna vrijednost zračnog raspora opada. To također smanjuje relativnu reaktivnu snagu magnetiziranja i povećava faktor snage. Povećanje sinkrone brzine s konstantnom nazivnom snagom motora dovodi do istog rezultata. Brzi strojevi imaju manje dimenzije, što je zbog smanjenja okretnog momenta, značajno smanjuje volumen zračnog prostora između jezgri statora i rotora.
Krivulje ovisnosti specifične snage magnetiziranja motora o nominalnom kontrastu prikazane su na sl. 4, iz čega se može vidjeti da je veća nominalna snaga motora i veća sinkrona brzina manja specifična snaga magnetiziranja.
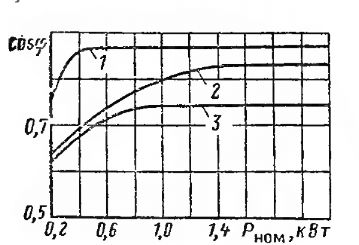
Lik: 3 Krivulje ovisnosti faktora snage o nazivnoj snazi \u200b\u200basinkronih motora pri različitim vrijednostima sinkrone brzine:
1 - "1 \u003d 3000 o / min; 2- / 2, -1500 o / min; 3 - "1 \u003d 1000 o / min 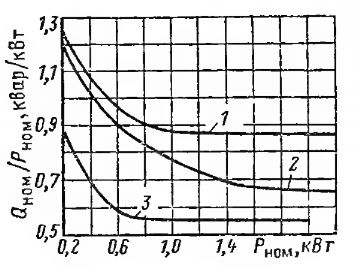
Lik: 4. Krivulje ovisnosti specifične snage magnetiziranja o nazivnoj snazi \u200b\u200basinhronih motora pri različitim vrijednostima sinkrone brzine:
1 - n, "\u003e 1000 o / min; 2- "1-1500 o / min; 3 - "1 \u003d 3000 o / min
Prijelaz iz ovisnosti prikazanih na sl. 3, na ovisnosti na sl. 4 dobiva se koristeći sljedeće omjere:
(7)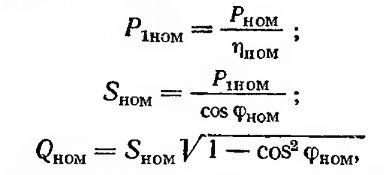
gdje je Show, Qhom - motor pune i jalove snage pri nazivnom opterećenju.
Iz usporedbe Sl. 3 i 4, lako je izvesti zaključak o utjecaju faktora snage na energetske performanse motora i njihovog sustava napajanja: za motore s povećanim faktorom snage pri zadanom nominalnom opterećenju (Pg \u003d Pnom), reaktivni snaga magnetiziranja je manja. To dovodi do smanjenja ukupne snage i, shodno tome, do smanjenja struje potrošene iz mreže.
Kao rezultat, smanjuju se električni gubici u namotima strojeva, a pad napona u žicama sustava napajanja je ograničen.