Асинхронный двигатель трехфазного тока
Прямым включением в сеть связан с бросками тока в статорной цепи. Это общеизвестный факт. Но не все задумывались о том, в чем причина этого явления. Мы привыкли, что ток любого электродвигателя прямо пропорционален вращающему моменту на валу. А здесь, казалось бы, парадоксальная ситуация: момент двигателя при пуске ограничен, а ток может превышать номинальное значение в семь раз. Как же так получается?
Все дело в физике работы асинхронной машины. Переменное электромагнитное поле статора наводит ЭДС в обмотке ротора двигателя. Величина этой ЭДС, в соответствии с законами электромагнитной индукции, зависит от скорости изменения электромагнитного поля статора, то есть от частоты вращения этого поля относительно ротора (от скольжения).
Но если поле статора начинает вращаться сразу после подачи напряжения, то ротору необходимо какое-то время, для того, чтобы разогнаться. И чем мощнее и больше двигатель, тем больше времени требуется ротору для разгона – увеличенная масса способствует инерции.
Величина скольжения, в свою очередь, имеет самое большое значение именно в первый момент пуска. В этот момент скольжение равно единице, ротор еще неподвижен, а поле уже вращается с максимальной скоростью. ЭДС в роторной цепи достигает максимального значения, так же как и ток ротора.
Ток ротора тоже является переменным, поэтому он тоже создает свое переменное электромагнитное поле. Это поле опять же наводит ЭДС уже в статорной цепи двигателя. А под воздействием упомянутой ЭДС в статоре начинает протекать дополнительная составляющая тока, компенсирующая МДС ротора.
Таким образом, ток в статоре всегда складывается из двух сонаправленных составляющих. Величина одной составляющей обусловлена собственным сопротивлением статорной обмотки. Эта составляющая имеет постоянное значение и на идеальном холостом ходу двигателя весь статорный ток сводится только к ней.
А вторая составляющая статорного тока зависит от тока в роторной цепи и своего максимума достигает в первый момент пуска двигателя, уменьшаясь до нуля по мере приближения к точке идеального холостого хода. За счет второй составляющей статорный ток двигателя и достигает таких огромных значений при пуске.
Остается невыясненным только один нюанс: почему большой пусковой ток асинхронного двигателя не обеспечивает столь же большого пускового момента, как это бывает у двигателей постоянного тока? Причина состоит в том, что момент двигателя создается только активной составляющей тока ротора, то есть той составляющей, которая совпадает по фазе с роторной ЭДС.
А соотношение активного и реактивного тока ротора зависит, прежде всего, от частоты ЭДС, наводимой в роторной обмотке. Чем выше частота, тем более «переменным» становится ток и тем большее значение приобретает индуктивное сопротивление обмоток ротора. А чем больше индуктивное сопротивление роторных обмоток, тем более реактивным становится роторный ток.
Да, пусковой ток в роторной цепи асинхронного двигателя велик, но это преимущественно реактивный ток, он не может обеспечить большой электромеханический момент. Активный ток достигает необходимой величины только после снижения частоты ЭДС и выхода двигателя на рабочую характеристику. С этим и связаны две проблемы пуска асинхронных двигателей: ограниченный пусковой момент и, напротив, повышенный в несколько раз пусковой статорный ток.
Максимальной частоты ЭДС ротора достигает именно в момент пуска, когда ротор неподвижен. В этот момент роторная ЭДС изменяется с частотой питающей сети – 50 герц. Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
«МАТИ» - РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
ИМ. К.Э. ЦИОЛКОВСКОГО
Кафедра "Электроника и информатика"
ТРЁХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Методические указания к лабораторной работе по курсу:
«Электроника и электротехника»
Составитель: Марченко А.Л.
МОСКВА 2005
ЦЕЛЬ РАБОТЫ
Снять и построить механическую и рабочие характеристики трехфазного асинхронного двигателя (АД); изучить модели АД и исследовать их работу в переходных режимах.
ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ И РАСЧЁТНЫЕ ФОРМУЛЫ
1. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ АД
Наибольшее применение в промышленности получили трёхфазные асинхронные двигатели (рис. 19.1). Это объясняется тем, что они просты по конструкции, дешевы, надёжны в работе, имеют высокий КПД при номинальной нагрузке, выдерживают значительные перегрузки, не требуют сложных пусковых устройств.
Н аряду
с преимуществами АД имеют ряд недостатков,
основными из которых являются: низкий
коэффициент мощности (cos
)
при неполной нагрузке (при холостом
ходе cos
0
=
0,2...0,3); низкий КПД при малых нагрузках;
малоудовлетворительные регулировочные
характеристики.
аряду
с преимуществами АД имеют ряд недостатков,
основными из которых являются: низкий
коэффициент мощности (cos
)
при неполной нагрузке (при холостом
ходе cos
0
=
0,2...0,3); низкий КПД при малых нагрузках;
малоудовлетворительные регулировочные
характеристики.
О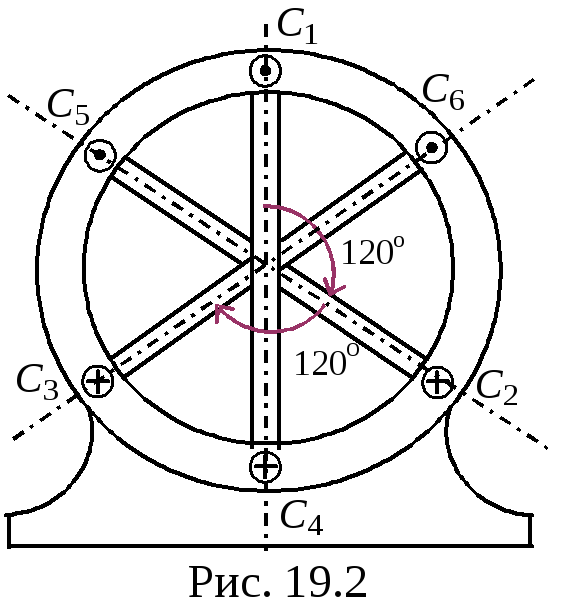 сновными
частями АД являютсястатор
и ротор,
отдалённые друг от друга воздушным
зазором (0,3...0,5 мм). Их сердечники собраны
из листов электротехнической стали. На
внутренней части поверхности статора
и на внешней ротора выштампованы пазы,
в которые уложены обмотки. Сердечник
статора помещён в корпус, на котором
закреплены клеммы статорной обмотки,
состоящей из трёх самостоятельных
обмоток, сдвинутых в пространстве на
120
(рис. 19.2). Сердечник ротора укреплён
непосредственно на валу двигателя или
на ступице, надетой на вал.
сновными
частями АД являютсястатор
и ротор,
отдалённые друг от друга воздушным
зазором (0,3...0,5 мм). Их сердечники собраны
из листов электротехнической стали. На
внутренней части поверхности статора
и на внешней ротора выштампованы пазы,
в которые уложены обмотки. Сердечник
статора помещён в корпус, на котором
закреплены клеммы статорной обмотки,
состоящей из трёх самостоятельных
обмоток, сдвинутых в пространстве на
120
(рис. 19.2). Сердечник ротора укреплён
непосредственно на валу двигателя или
на ступице, надетой на вал.
Обмотка
ротора может быть выполнена короткозамкнутой
или трёхфазной аналогично обмотке
статора. Короткозамкнутая обмотка
ротора выполняется в виде "беличьего
колеса",
состоящего из стержней и замыкающих их
на торцах колец (рис. 19.3, а
и б
).
У АД с фазным ротором (см. рис. 19.1, в
)
одни концы о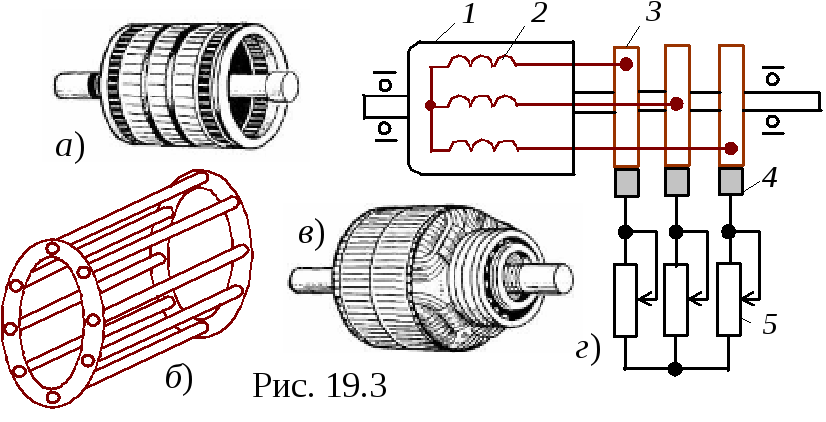 бмоток2
ротора 1
соединяются с контактными кольцами 3
,
расположенными на валу двигателя, а
другие - соединены в звезду (рис. 19.3, в
и г
).
Контактные кольца 3
соединяются
с контактами неподвижной части машины
с помощью щёток 4
и щёткодержателей. К ним подключают
пусковой
реостат 5.
бмоток2
ротора 1
соединяются с контактными кольцами 3
,
расположенными на валу двигателя, а
другие - соединены в звезду (рис. 19.3, в
и г
).
Контактные кольца 3
соединяются
с контактами неподвижной части машины
с помощью щёток 4
и щёткодержателей. К ним подключают
пусковой
реостат 5.
Принцип действия АД основан на взаимодействии вращающегося магнитного поля статора (неподвижная часть машины) с токами, индуктируемыми в роторе (подвижная часть).
Рассмотрим принцип создания магнитного поля машины. Трёхфазная обмотка статора питается от трёхфазной системы напряжения (см. рис. 19.1, а ) с фазными напряжениями U 1 ф . Так как три фазные обмотки (сдвинутые в пространстве одна относительно другой на 120 (рис. 19.2) и имеющие число витков w 1) замкнуты, то в них протекают токи i 1 , в результате создаются три МДС F 1 = i 1 w 1 . Под действием этих трёх МДС образуется вращающееся магнитное поле, результирующий вектор магнитного потока которого Ф р = 3/2Ф m , где Ф m - магнитный поток, созданный фазной МДС F 1 .
Согласно закону электромагнитной индукции в обмотках статора и ротора наводятся ЭДС е 1 и е 2 . Цепь обмоток ротора всегда замкнута, поэтому в фазных обмотках ротора протекают токи i 2 , значения которых зависят от нагрузки. Согласно закону Ампера от взаимодействия токов ротора с вращающимся магнитным полем статора на валу двигателя возникает вращающий момент М , и, если он больше момента сопротивления М с на валу, то ротор приходит во вращение. Согласно правилу Ленца токи ротора, как и создаваемое ими вращающееся магнитное поле, воздействуют на токи статорных обмоток и магнитный поток Ф р машины, вызывая рост тока статора, чтобы скомпенсировать размагничивающее действие токов роторной обмотки.
Частота
вращающегося магнитного поля
статора (в об/мин) определяется по
выражению:
 ,
гдеf
1
-
частота питающего двигатель напряжения
сети; р
- число пар полюсов машины (в частности,
три обмотки статора создают одну пару
полюсов, шесть обмоток - две пары и т.
д.).
,
гдеf
1
-
частота питающего двигатель напряжения
сети; р
- число пар полюсов машины (в частности,
три обмотки статора создают одну пару
полюсов, шесть обмоток - две пары и т.
д.).
Рассматриваемая машина называется асинхронной потому, что в ней частота вращения ротора n 2 не равна частоте вращающегося магнитного поля статора n 1 . Если бы эти частоты были равны, то магнитный поток статора был бы неподвижен относительно вращающегося ротора, и в обмотках ротора не индуктировались бы ЭДС, не было бы в них токов и не возникал бы вращающий момент на валу.
Разность частот вращения поля статора и ротора называют частотой скольжения n s = n 1 - n 2 , а её отношение к частоте n 1 - скольжением S , т. е.
 или
(выраженное в процентах)
или
(выраженное в процентах)
Диапазон изменения скольжения в асинхронном двигателе 1 S 0; при пуске S = 1, при холостом ходе S = 0,001...0,005, при номинальной нагрузке S = 0,03...0,07.
2. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ АД
Одной из основных характеристик АД является механическая характеристика n 2 = f (М ) – зависимость частоты вращения n 2 от момента М на валу двигателя (рис. 19.4). Естественная механическая характеристика 1 (см. рис. 19.4 и рис. 19.5) асинхронного двигателя описывается уравнением
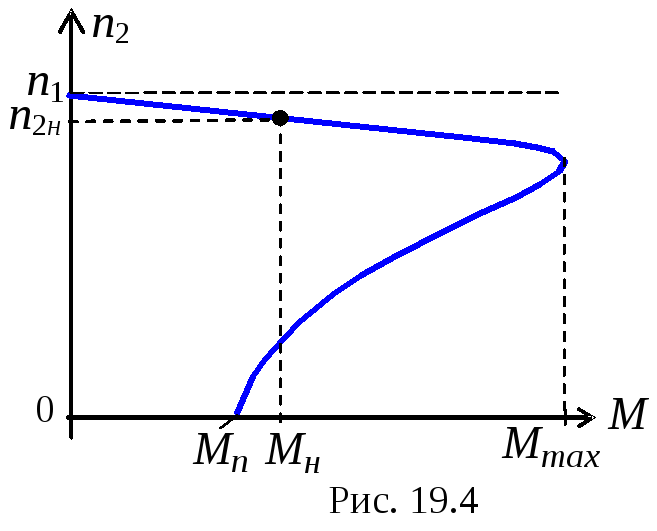
При увеличении нагрузки на валу скольжение S увеличивается, а частота вращения ротора снижается на 5...10%, т. е. механическая характеристика n = ¦ (M ) АД является жёсткой (см. рис. 19.4);
Изменение направления вращения ротора АД - реверсирование - осуществляется переключением любых двух проводов трехфазной системы, питающей двигатель.
Вращающий момент АД пропорционален квадрату фазного напряжения U 1 ф сети и зависит от скольжения S , т. е.
где
m
1
- число фаз статора; Х
К
=
X
1
+ ;
R
1 ,
X
1
и
;
R
1 ,
X
1
и ,-
активное,
индуктивное сопротивления обмотки
статора и приведенные сопротивления
обмотки ротора.
,-
активное,
индуктивное сопротивления обмотки
статора и приведенные сопротивления
обмотки ротора.
При
увеличении момента сопротивления М
с
на валу увеличивается скольжение, что
приводит к возрастанию вращающего
момента до величины М
с
.
Скольжение, при котором момент достигает
максимального значения М
max
,
называется критическим и находится по
выражению S
кр
/Х
К
.
Величины
критического скольжения S
кр
и пускового момента М
п
зависят
от сопротивления цепи ротора (см. кривые
2
…4
на рис. 19.5), причем момент
М
п
растёт с увеличением
 ,
достигаяМ
max
при
+
,
достигаяМ
max
при
+
Х
К
,
где
- приведенное сопротивление
пускового реостата, используемого в АД
с фазным ротором для снижения пускового
тока, увеличения пускового момента (см.
кривую 4
на рис. 19.5, б
),
обеспечения плавности пуска и регулирования
частоты вращения ротора (см. реостатные
механические характеристики 2
…4
на рис. 19.5, б
).
Х
К
,
где
- приведенное сопротивление
пускового реостата, используемого в АД
с фазным ротором для снижения пускового
тока, увеличения пускового момента (см.
кривую 4
на рис. 19.5, б
),
обеспечения плавности пуска и регулирования
частоты вращения ротора (см. реостатные
механические характеристики 2
…4
на рис. 19.5, б
).
3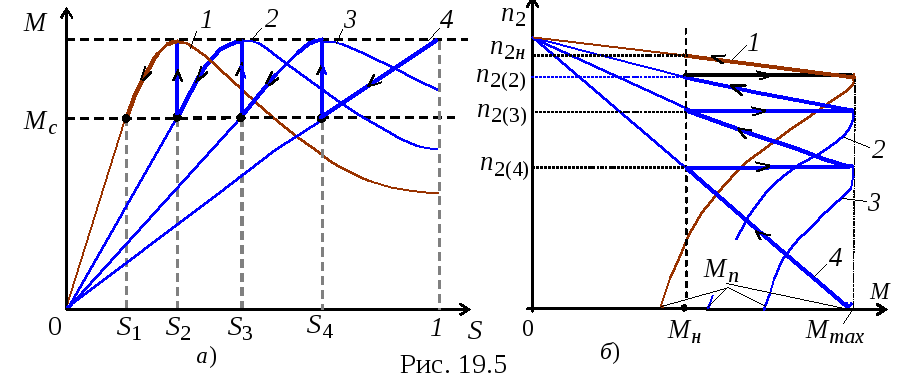 .
РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
.
РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
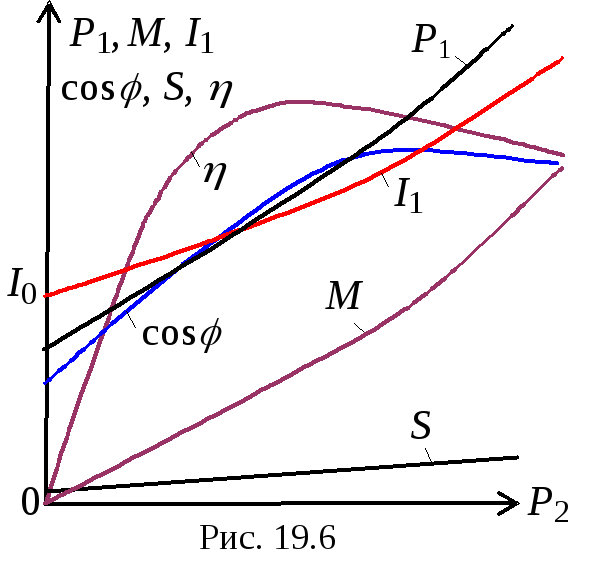 Эксплуатационные
свойства асинхронного двигателя
можно оценить по рабочим
характеристикам,
которые изображаются кривыми,
выражающими графические
зависимости от полезной мощности Р
2
величин: тока I
1
в обмотке статора, КПД
,
скольжения S
,
коэффициента мощности cos
,
полезного момента M
на
валу АД при U
1
=
const
и
f
1
=
const
(рис. 19.6). Их определяют экспериментально
или путём расчёта, используя схему
замещения асинхронного двигателя.
Эксплуатационные
свойства асинхронного двигателя
можно оценить по рабочим
характеристикам,
которые изображаются кривыми,
выражающими графические
зависимости от полезной мощности Р
2
величин: тока I
1
в обмотке статора, КПД
,
скольжения S
,
коэффициента мощности cos
,
полезного момента M
на
валу АД при U
1
=
const
и
f
1
=
const
(рис. 19.6). Их определяют экспериментально
или путём расчёта, используя схему
замещения асинхронного двигателя.
При холостом ходе мощность Р 2 = 0; при этом токи обмоток статора I 0 , создающие вращающее магнитное поле, довольно велики и составляют 30…50% номинальных токов I 1 н . Частота вращения ротора n 20 = = (0,995…0,998) n 1 .
По
мере роста нагрузки на валу ток статора
увеличивается,
как и активные мощности
Р
2
и
Р
1 .
В свою очередь, увеличивается коэффициент
мощности
 .
При этом скольжениеS
увеличивается, а частота вращения
вала n
2
уменьшается,
поскольку это единственная причина
увеличения тока и вращающего
электромагнитного момента.
.
При этом скольжениеS
увеличивается, а частота вращения
вала n
2
уменьшается,
поскольку это единственная причина
увеличения тока и вращающего
электромагнитного момента.
Зависимость М = f (Р 2) определяется формулой М = 9550Р 2 /n 2 , из которой следует, что эта зависимость представляет несколько искривленную прямую, проходящую через начало координат, т. к. с увеличением нагрузки на валу частота вращения ротора АД несколько уменьшается.
Характер
зависимости коэффициента мощности
АД
от
мощности
на валу, т. е. cos
=
f
(Р
2),
определяется выражением cos
= Р
1 / и равен 0,8...0,89 для нормальных АД средней
мощности при номинальной нагрузке. С
уменьшением нагрузки на валу cos
снижается
и доходит до значений 0,2...0,3 при холостом
ходе. В этом режиме полезная мощность
на валу равна нулю, однако двигатель
потребляет мощность из сети, поэтому
cos
0
здесь
не равен нулю.
и равен 0,8...0,89 для нормальных АД средней
мощности при номинальной нагрузке. С
уменьшением нагрузки на валу cos
снижается
и доходит до значений 0,2...0,3 при холостом
ходе. В этом режиме полезная мощность
на валу равна нулю, однако двигатель
потребляет мощность из сети, поэтому
cos
0
здесь
не равен нулю.
Характеристика коэффициента полезного действия h = f (Р 2) АД нарастает очень быстро от нуля (холостой ход) до 0,4...0,5 номинальной нагрузки и достигает наибольшего значения (0,85…0,95.) в пределах от 0,7 до 0,8 номинальной нагрузки, а затем медленно падает вследствие роста переменных потерь (см. рис. 19.6).
4. КРАТКОЕ ОПИСАНИЕ МОДЕЛЕЙ АД
ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ИХ
ВЫПОЛНЕНИЮ
Задание 1. Ознакомиться с интерфейсом модели испытания АД (рис. 19.7), уточнив назначение окон (полей), в т. ч. снабженных стрелками для изменения, например, момента сопротивления на валу, сопротивления пускового реостата, выбора схемы соединения обмоток статора, а также окон выходных величин, имитирующих показания измерительных приборов.
Согласно варианту N выбрать тип двигателя (для нечетных вариантов из табл. 1 АД с короткозамкнутым ротором, а для четных - из табл. 2 АД с фазным ротором, где N – совпадает с номером записи фамилии студента в учебном журнале группы), записать в отчёт его номинальные данные: номинальную механическую мощность Р н = Р 2 н на валу, линейное напряжение питания U н и его частоту f 1 , номинальный ток I н , номинальную частоту вращения вала n н , КПД н , номинальный коэффициент мощности cos н , число пар полюсов р вращающегося магнитного поля статора.
Задание 2. Осуществить "пуск в ход" АД (запустить программу моделирования и расчета параметров АД) и "снять" механическую и рабочие характеристики АД. С этой целью:
Щелкнуть мышью на кнопке "Пуск", т. е. "подключить" обмотки статора АД к трехфазной сети переменного тока и записать в строку 1 табл. 19.1 значения линейного напряжения U 1 , линейного тока I 1 , активной мощности Р 1 , "потребляемой" АД из сети, частоты вращения ротора n 2 в режиме холостого хода (полезный момент на валу М = 0), которые выводятся в соответствующих полях на экране дисплея;
- "снять" механическую n 2 = f (M ) и рабочие I 1 = f (Р 2), cos = f (Р 2), S = f (Р 2), Р 1 = f (Р 2), M = f (Р 2), h = f (Р 2) характеристики двигателя.
Для снятия характеристик необходимо:
Щелкнуть мышью на кнопке "Вкл. нагрузки", размещенной внизу рабочего поля модели АД, т. е. "подключить" цепь обмотки возбуждения электромагнитного тормоза к сети;
Ступенчато увеличивая момент сопротивления (нагрузку) М на валу АД, записать в табл. 19.1 показания "измерительных приборов" при 8...9 значениях момента М : от режима холостого хода (М = 0, Р 2 = 0) до значения М = (1,2...1,5)М н или Р 2 = (1,2...1,5)Р 2 н .
Таблица 19.1
|
измерения |
Результаты измерений |
Результаты вычислений |
|||||||
Наблюдения за изменением нагрузки на валу можно вести как по значениям момента М , так и по значениям мощности Р 1 , потребляемой АД из сети. Например, для асинхронного двигателя с параметрами: Р 2 н = 0,55 кВт, h н = 0,705 и Р 1 н = Р 2 н /h н = 0,55/0,705 = 0,78 кВт изменения мощности будут от Р 0 (мощность при холостом ходе) до Р 1 = 1,1...1,15 кВт.
Задание 3. По данным моделирования процессов в АД рассчитать полезную мощность P 2 на валу, скольжение S , коэффициент мощности cos и КПД h двигателя при разных нагрузках, воспользовавшись следующими расчётными формулами:
 =
Р
2 /Р
1 ;
cos
= Р
1 /
=
Р
2 /Р
1 ;
cos
= Р
1 / ,
,
Широкое распространение в различных отраслях народного хозяйства получили асинхронные двигатели трехфазного тока с короткозамкнутым ротором. Они не имеют скользящих контактов, просты по устройству и обслуживанию Двигатель с короткозамкнутым ротором в разобранном виде показан на рис. 1. Основными его частями являются статор и ротор. Сердечники статора и ротора набирают из листов электротехнической стали.
В пазах сердечника статора укладывают и закрепляют трехфазную обмотку В зависимости от напряжения питающей сети и данных двигателя ее соединяют звездой или треугольником. Выводы обмоток статора маркируют, благодаря этому облегчается сборка нужной схемы соединения.
В соответствии с ГОСТ 183-74* приняты следющие обозначения выводов обмоток отдельных фаз соответственно начало и конец первой фазы С1 и С4, второй - С2 и С5 и третьей - СЗ и С6 (рис 2). Расположение выводов на коробке контактных зажимов двигателя должно удовлетворять требованию простоты соединения обмоток по любой схеме Обмотку ротора от его сердечника не изолируют. Ее вместе с вентиляционными лопатками выполняют литой из алюминия или его сплавов. Стержни обмотки и накоротко замыкающие их кольца образуют так называемую беличью клетку.
Конструктивное выполнение двигателей зависит от способа вентиляции и степени защиты.
Асинхронные короткозамкнутые двигатели единой серии 4А по способу охлаждения и степени защиты персонала от соприкосновения с токоведущими или вращающимися частями, а также самой машины от попадания в нее посторонних тел имеют два исполнения (ГОСТ 14254-80): закрытое обдуваемое (обозначение IP44), защищенное (обозначение IP23).
Двигатели исполнения IP44 имеют аксиальную систему вентиляции. Воздух подается вентилятором и обдувает внешнюю оребренную поверхность станины.
Для двигателей IP23 характерна двусторонняя радиальная система вентиляции, которая осуществляется при помощи вентиляционных лопаток, расположенных на короткозамыкающих кольцах ротора.
Рис. 1 Асинхронный двигатель с короткозамкнутым ротором в разобранном виде
1 - статор, 2 - клеммная коробка, 3 -ротор 4 - подшипниковые щиты, 5 - вентилятор, 6 - кожух вентилятора
Двигатели этой серии имеют следующую структуру обозначений: 4 - порядковый номер серии; А - наименование вида двигателя - асинхронный; А - станина и щиты из алюминия; X - станина из алюминия и чугунные щиты; 56-355 - высота оси вращения; S, L, М - установочные размеры по длине корпуса; А, В - обозначение длины сердечника (первая длина - А, вторая-В); 2, 4, 6, 8, 10, 12 -число полюсов; У - климатическое исполнение двигателей; 3 - категория размещения. Например: 4АА56А2УЗ - электродвигатель серии 4, асинхронный, закрытого исполнения, станина и подшипниковые щиты из алюминия, с высотой оси вращения 56 мм, сердечник первой длины, двухполюсный, для районов умеренного климата, категории размещения 3.
Рис 2 Расположение выводов на щитке двигателя при соединении: а - звездой; б - треугольником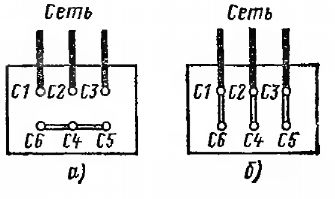
Таблица 1
Тип двигателя |
Номинальная мощность, кВт |
||
n = 3000 об/мин |
|||
n = 1500 об/мин |
|||
n = 1000 об/мин |
|||
Продолжение табл. 1
Тип двигателя |
Номинальная мощность, кВт |
||
Основные технические данные двигателей небольшой мощности серии 4А приведены в табл. 1.
Разработана и выпускается единая серия асинхронных двигателей АИ. Улучшение энергетических, пусковых и виброшумовых характеристик машин этой серии достигается за счет применения новых материалов и конструктивных решений.
Основные технические данные двигателей небольшой мощности серии АИ приведены в табл. 2.
Трехфазный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Частота вращения поля n называется синхронной. Она зависит от частоты fi питающего напряжения и числа пар полюсов р машины:![]()
и при f 1-50 Гц принимает значения: 3000 об/мин (р- ==1), 1500 об/мин (р=2), 1000 об/мин (р=3) и т. д.
Для частоты напряжения сети будем иметь:
Ротор асинхронного двигателя, вращаясь в направлении вращения поля, развивает частоту, несколько меньшую, чем синхронная, называемую асинхронной.
Таблица 2
Тип двигателя |
Номинальная мощность, кВт |
Синхронная частота вращения, об/ш<н |
||
АИР80А2-ОМ2 |
||||
АИР80В4-ОМ2 |
||||
АИР80А6-ОМ2 |
||||
АИР80В6-ОМ2 |
||||
Отставание ротора характеризуется скольжением s. Если частоту вращения ротора обозначить через ri2, то соотношение для скольжения примет вид
или, %,
Из (2) следует, что скольжение асинхронного двигателя изменяется от единицы (при пуске, когда п2-0) до нуля (при синхронной частоте вращения, т. е. когда П2-П1). Заметим, что точного равенства частоты вращения поля и ротора в двигательном режиме не достигается. Однако отставание ротора на холостом ходу машины так мало, что им можно пренебречь. Значения скольжений при полной нагрузке двигателя обычно составляют 4-6 %.
Выражение для частоты вращения ротора можно получить из соотношения (2):
Заметим, что числитель правой части равенства (2) имеет определенный физический смысл. Разность частоты вращения поля и ротора представляет собой относительную частоту вращения, т. е. частоту вращения поля относительно ротора ns, или частоту скольжения.
Пример. Известны «1 = 1000 об/мнн, s=4%. Вычислить частоту вращения ротора и относительную частоту вращения.
Имеем: ла= 1000(1-0,04) =960 об/мин, ns=nl-n2= 1000-960= =40 об/мин.
Частота ЭДС и токов, наводимых в обмотке ротора вращающимся магнитным полем, определяется частотой скольжения:
Путем несложных преобразований это выражение приводится к виду
т.е. частота ЭДС и токов ротора при условии ft - const пропорциональна скольжению.
Пример. Найти частоту тока ротора для предыдущего примера.
Имеем- /2=/lS=50-0,04=2 Гц.
Развиваемая двигателем мощность в пределах нормальных нагрузок пропорциональна скольжению. Поэтому о нагрузке машины можно судить по скольжению.![]()
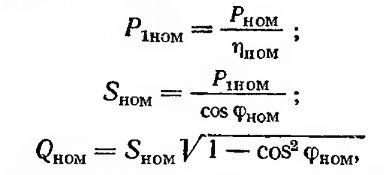
Использование мощности двигателя в процессе его эксплуатации может быть различным. Коэффициент использования мощности![]()
где Рг - полезная мощность при произвольной нагрузке; Рном - номинальная мощность, т. е. полезная мощность, на которую рассчитана электрическая машина.
Номинальной мощности соответствует номинальное напряжение. Двигатель потребляет при этом номинальный ток, имея номинальные значения частоты вращения, мощности на валу, КПД и cos φ.
Назначение двигателя состоит в преобразовании электрической энергии в механическую. В процессе преобразования возникают потери. Они представляют ту часть активной мощности, которая расходуется на нагревание обмоток, стали сердечника статора и преодоление сил трения.
Отношение полезной мощности Р2, развиваемой двигателем на валу, к активной мощности Р\, потребляемой им из сети, называется коэффициентом полезного действия:![]()
Кроме активной, двигатель потребляет реактивную намагничивающую мощность, необходимую для образования магнитного потока. Таким образом, полная мощность двигателя 5 состоит из активной и реактивной составляющих:
где Q - реактивная мощность двигателя.
Об относительном значении преобразованной мощности судят по коэффициенту мощности. Чем лучше используется мощность машины, тем выше коэффициент мощности. Для его вычисления достаточно активную мощность разделить на полную:
где U, I - фазные значения напряжения и тока.
Пример. На щитке трехфазного асинхронного двигателя с короткозамкнутым ротором имеются следующие обозначения: Д"А. 220/
380 В, 10,5/6,1 А, 2,8 кВт, 50 Гц, 2880 об/мин, КДД=81,5 %, cos
(в данном случае она равна 3000 об/мин), то скольжение при номинальной нагрузке составит:
Полная мощность двигателя при номинальной нагрузке SHom = 3l/ном /ном = 3-220-6,1 « 4000 В-А = 4 кВ-А.
Активная мощность, потребляемая двигателем при номинальной нагрузке,
Рхном = 31/ном /ном««Ф,ном = 3-220-6,1-0,86 = 3,44 кВт.
Потери в двигателе при номинальной нагрузке
2ДРиш = Ртш - Р2 = 3,44 - 2,8 = 0,64 кВт.
С использованием данных табл. 1 построены кривые зависимости коэффициента мощности двигателей от их номинальной мощности (рис. 3).
Кривая 1 соответствует синхронной частоте вращения 3000 об/мин, 2 - 1500 об/мин и 3- 1000 об/мин. Из рис. 3 видно, что коэффициент мощности асинхронного двигателя зависит от номинальной мощности и синхронной частоты вращения.
С увеличением мощности при постоянстве синхронной частоты вращения («!=const) уменьшается относительное значение воздушного зазора. Благодаря этому относительная реактивная намагничивающая мощность также уменьшается, а коэффициент мощности возрастает. К такому же результату приводит увеличение синхронной частоты вращения при постоянстве номинальной мощности двигателя. Скоростные машины имеют меньшие габариты, что обусловлено уменьшением вращающего момента, у них существенно уменьшается объем воздушного пространства между сердечниками статора и ротора.
Кривые зависимости удельной намагничивающей мощности двигателей от номинальной при - const показаны на рис. 4, откуда видно, что удельная намагничивающая мощность тем меньше, чем больше номинальная мощность двигателя и выше синхронная частота вращения.
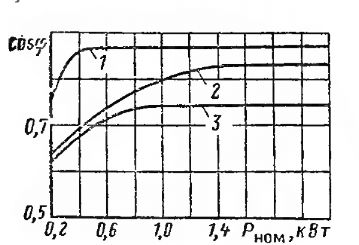
Рис. 3 Кривые зависимости коэффициента мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения:
1 - «1=3000 об/мин; 2-/2,-1500 об/ /мин; 3 - «1 = 1000 об/мин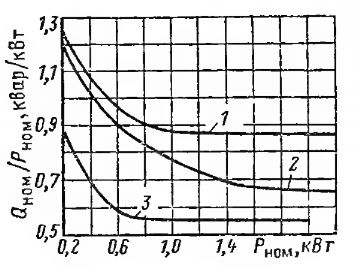
Рис. 4. Кривые зависимости удельной намагничивающей мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения:
1 - п,«>1000 об/мин; 2- «1-1500 об/мин; 3 - «1=3000 об/мин
Переход от зависимостей, приведенных на рис. 3, к зависимостям на рис. 4 производят с использованием следующих соотношений:
(7)
где Show, Qhom - полная и реактивная мощности двигателя при номинальной нагрузке.
Из сопоставления рис. 3 и 4 нетрудно сделать заключение о влиянии коэффициента мощности на энергетические показатели двигателей и питающей их системы: у двигателей с повышенным коэффициентом мощности при данной номинальной нагрузке (Рг=Рном) реактивная намагничивающая мощность меньше. Это приводит к уменьшению полной мощности и, соответственно, к уменьшению тока, потребляемого из сети.
В результате электрические потери в обмотках машины уменьшаются и ограничивается падение напряжения в проводах системы электроснабжения.