Способ определения номинальной частоты вращения ротора электростатического гироскопа. Механические характеристики асинхронных двигателей
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
- Механическая характеристика
- Рабочие характеристики
Устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 - обозначения начала фаз. С3, С4 и С5 - соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
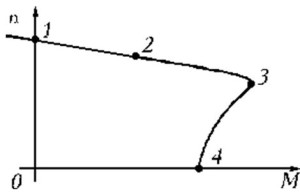
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M) .
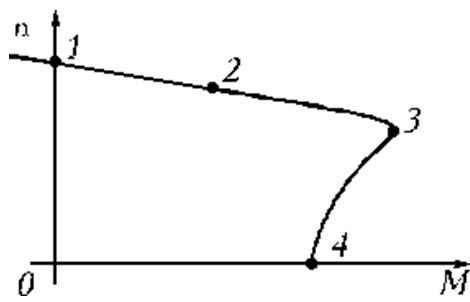 Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 - непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 - непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 - номинальный режим работы. Точка 3 - частота вращения достигла критического значения. Пусковой момент Мпуск - точка 4.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн - номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск - из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30-40% от номинального.
Формула расчета при критическом скольжении:
Ток в начальный момент пуска:
Все значения отражают электромеханическую характеристику.
Рабочие характеристики
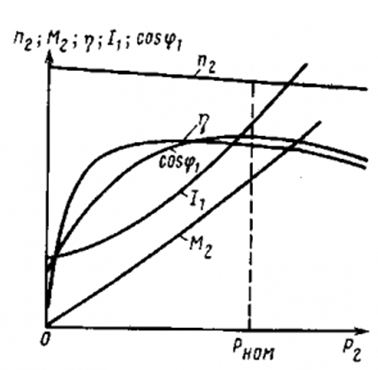 Рабочие характеристики асинхронного электродвигателя - это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Рабочие характеристики асинхронного электродвигателя - это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это .
Q = √(S 2 - P 2)
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √(3046 2 - 2650 2) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
На шильдике мы видим, что при питании переменным током , ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ((n - n1 )/n) *100%
Для нашего примера s = ((3000 - 2870)/3000) *100% = 4,3%.

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
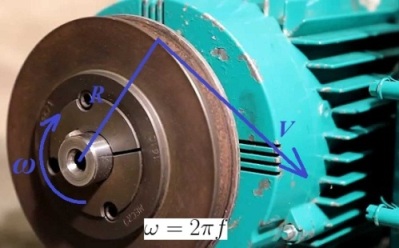
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
v = ωR
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
P = ω М
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
М = FR
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
ПРАКТИЧЕСКАЯ РАБОТА №4
по дисциплине
Электромеханические системы
РАСЧЁТ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ
Вариант 13
Выполнил: ст. гр. УИТ – 53
Колотилин И.С.
Мефёдова Ю. А.
Задача 1. Трехфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 180 М2, используемый в качестве электропривода насосного агрегата консольного типа марки ВК 10/45, предназначенного для перекачивания воды для технических нужд, негорючих и нетоксичных жидкостей, имеет следующие номинальные данные: мощность на валу Р 2н = 30 кВт; скольжение S н = 0,025 (2,5%); синхронная частота вращения n 1н =3000 об/мин; коэффициент полезного действия η н = 0,905 (90,5%); коэффициент мощности обмотки статора cos φ н =0,88. Известны также: отношение пускового момента к номинальному М п / М н =1,7; отношение пускового тока к номинальному I п /I н =7,5; отношение максимального (критического) вращающего момента к номинальному М max /M н =2,7. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц. Требуется определить:
номинальную частоту вращения ротора двигателя;
вращающий номинальный, критический и пусковой моменты двигателя;
мощность, потребляемую двигателем из сети Р 1н;
номинальный и пусковой токи;
5)пусковой ток и вращающие моменты, если напряжение в сети снизилось по отношению к номинальному на 5, 10 и 15% (U c = 0,95∙U н; U c = =0,9∙U н; U c = 0,85∙U н).
1. Номинальная частота вращения:
n 2н = n 1н ∙(1 – S н ) = 3000∙(1 - 0,025) = 2925 об/мин.
2. Номинальный вращающий момент на валу:
3. Пусковой вращающий момент двигателя:
М п = 1,7∙М н = 1,7∙97,95 = 166,5 Н∙м.
4. Максимальный вращающий момент:
М m ах = 2,7∙М н = 2,7∙97,95 = 264,5 Н∙м.
5. Номинальную мощность Р 1н, потребляемую двигателем из сети, определим из выражения:
η н= Р 2н /Р 1н Р 1н = Р 2н / η н = 30/0,905 = 33,15 кВт;
при этом номинальный ток, потребляемый двигателем из сети, может быть определен из соотношения:
а пусковой ток при этом будет:
I n = 7,5∙I 1н = 7,5∙57 = 427,5 А.
6. Определяем вращающий момент при снижении напряжения в сети:
− на 5%. При этом на двигатель будет подано 95% U H , или U = 0,95∙U н . Так как известно, что вращающий момент на валу двигателя пропорционален квадрату напряжения М ≡U 2 , то он составит (0,95) 2 = 0,9 от номинального. Следовательно, пусковой вращающий момент будет:
М 5% = 0,90∙М п = 0,9∙166,5 = 149,9 Н∙м;
− на 10%. При этом U =0,9∙U н ;
M 10 % = 0,81∙М п = 0,81∙166,5 = 134,9 Н∙м;
− на 15%. В данном случае U= 0,85∙U н;
М 15% = 0,72∙166,5 = 119,9 Н∙м.
Отметим, что работа на сниженном на 15% напряжении сети допускается, например, у башенных кранов только для завершения рабочих операций и приведения рабочих органов в безопасное положение.
7. Находим, как влияет аналогичное снижение напряжения на пусковой ток двигателя I п:
− на 5%. Учитывая, что пусковой ток можно приближенно считать пропорциональным первой степени напряжения сети, получим:
I п5 % ≈0,95∙I п = 0,95∙427,5 = 406,1 А;
I п10 % ≈0,9∙I п = 0,9∙427,5 = 384,8 А;
I п15 % ≈0,85∙I п = 0,85∙427,5 = 363,4 А.
Задача 2. Трёхфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 13256 имеет следующие номинальные данные: мощность на валу Р 2н = 5,5 кВт; скольжение S н = 0,04 (4%); синхронная частота вращения n 1н =1000 об/мин; коэффициент полезного действия η н = 0,85 (85%); коэффициент мощности обмотки статора cos φ н = 0,8. Известны также: отношение пускового момента к номинальному М п / М н =2; отношение пускового тока к номинальному I п /I н =7; отношение максимального (критического) вращающего момента к номинальному М max /M н =2,2. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц.
Определить мощность, потребляемую двигателем из промышленной сети переменного тока 220/380В, 50Гц, ток в цепи статора при включении в сеть 220/380В и 220/127В, номинальные вращающий момент на валу двигателя.
1. Мощность, потребляемая трёхфазным двигателем из сети при номинальном режиме работы:
Р 1н = Р 2н /η н = 5,5/0,85 = 6,47кВт.
2. Ток, потребляемый обмоткой статора из сети при соединении обмотки:
− звездой:
− треугольником:
3. Номинальный вращающий момент на валу двигателя.
Сначала найдём номинальную частоту вращения:
n 2н = n 1н ∙(1 – S н ) = 1000∙(1 - 0,04) = 960 об/мин.
4. Находим число пар полюсов р обмотки статора, имея в виду, что частота промышленной сети f = 50 Гц:

Задача 3. Для привода промышленной вентиляционной установки используется трехфазный асинхронный двигатель с короткозамкнутым ротором типоразмера АИР 13256. Используя его технические данные, приведенные в задаче 2 , построить для него механическую характеристику в виде зависимости n 2 = f(М).
Из выражения:

где n 2н - частота вращения ротора двигателя при номинальной нагрузке;
n 1 - синхронная частота вращения магнитного поля статора (в этом случае n 1 = 1000 об/мин);
S н - скольжение при номинальной нагрузке (S H = 0,04)
Определяется величина частоты вращения ротора двигателя в номинальном режиме:
n 2н = 1000∙(1 - 0,04) = 960 об/мин.
2. По значениям S н
и
 ,находим
критическое скольжение:
,находим
критическое скольжение:
3. Находим номинальный М ном и максимальный (критический) М m ах моменты:
4. Для построения механической характеристики воспользуемся формулами:
 ,
,
где S - текущее значение скольжения.
Задаваясь значениями S от 1 до 0, с требуемым шагом (например так, как показано в таблице 3) вычисляем величины n и М , им соответствующие. Результаты заносим в эту таблицу и по ним строим механическую характеристику n 2 = f(М).
На ней отметим (*)А, соответствующую номинальному режиму работы.
Таблица 1 - Результаты расчета механической характеристики электродвигателя
|
n, об/мин | ||||||||||||
|
M, Н·м |
![]()
Рисунок 1 - Механическая характеристика трехфазного асинхронного двигателя п 2 = f (M ) .
Реферат выполнил ст-т 6-ого куса, 12 гр., спец. 1801, Полукаров А.Н.
Самарский Государственный Технический Университет
Кафедра «Электромеханика и нетрадиционная энергетика»
Самара, 2006
1. Введение.
Общие сведения об асинхронных машинах.
Асинхронной машиной называется двухобмоточная электрическая машина переменного тока, у которой только одна обмотка (первичная) получает питание от электрической сети с постоянной частотой ω1, а вторая обмотка (вторичная) замыкается накоротко или на электрические сопротивления. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота ω2 является функцией угловой скорости ротора Ω, которая в свою очередь зависит от вращающего момента, приложенного к валу.
Наибольшее распространение получили асинхронные машины с трехфазной симметричной разноименнополюсной обмоткой на статоре, питаемой от сети переменного тока, и с трехфазной или многофазной симметричной разноименнополюсной обмоткой на роторе.
Машины такого исполнения называют просто «асинхронными машинами», в то время как асинхронные машины иных исполнений относятся к «специальным асинхронным машинам».
Асинхронные машины используются в основном как двигатели; в качестве генераторов они применяются крайне редко.
Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока.
Разноименнополюсная обмотка ротора асинхронного двигателя может быть короткозамкнутой (беличья клетка) или фазной (присоединяется к контактным кольцам). Наибольшее распространение имеют дешевые в производстве и надежные в эксплуатации двигатели с короткозамкнутой обмоткой на роторе, или короткозамкнутые двигатели. Эти двигатели обладают жесткой механической характеристикой (при изменении нагрузки от холостого хода до номинальной их частота вращения уменьшается всего на 2-5%).
Двигатели с короткозамкнутой обмоткой на роторе обладают также довольно высоким начальным пусковым вращающим моментом. Их основные недостатки: трудность осуществления плавного регулирования частоты вращения в широких пределах; потребление больших токов из сети при пуске (в 5-7 раз превышающих поминальный ток).
Двигатели с фазной обмоткой на роторе или двигатели с контактными кольцами избавлены от этих недостатков ценой усложнения конструкции ротора, что приводит к их заметному удорожанию по сравнению с короткозамкнутыми двигателями (примерно в 1,5 раза). Поэтому двигатели с контактными кольцами на роторе находят применение лишь при тяжелых условиях пуска, а также при необходимости плавного регулирования частоты вращения.
Двигатели с контактными кольцами иногда применяют в каскаде с другими машинами. Каскадные соединения асинхронной машины позволяют плавно регулировать частоту вращения в широком диапазоне при высоком коэффициенте мощности, однако из-за значительной стоимости не имеют сколько-нибудь заметного распространения.
В двигателях с контактными кольцами выводные концы обмотки ротора, фазы которой соединяются обычно в звезду, присоединяются к трем контактным кольцам. С помощью щеток, соприкасающихся с кольцами, в цепь обмотки ротора можно вводить добавочное сопротивление или дополнительную ЭДС для изменения пусковых или рабочих свойств машины; щетки позволяют также замкнуть обмотку накоротко.
В большинстве случаев добавочное сопротивление вводится в обмотку ротора только при пуске двигателя, что приводит к увеличению пускового момента и уменьшению пусковых токов и облегчает пуск двигателя. При работе асинхронного двигателя пусковой реостат должен быть полностью выведен, а обмотка ротора замкнута накоротко. Иногда асинхронные двигатели снабжаются специальным устройством, которое позволяет после завершения пуска замкнуть между собой контактные кольца и приподнять щетки. В таких двигателях удается повысить КПД за счет исключения потерь от трения колец о щетки и электрических потерь в переходном контакте щеток.
Выпускаемые заводами асинхронные двигатели предназначаются для работы в определенных условиях с определенными техническими данными, называемыми номинальными. К числу номинальных данных асинхронных двигателей, которые указываются в заводской табличке машины, укрепленной на ее корпусе, относятся:
механическая мощность, развиваемая двигателем, Рн = P2н;
частота сети f1;
линейное напряжение статора U1лн
линейный ток статора I1лн;
частота вращения ротора nн;
коэффициент мощности cos φ1н;
коэффициент полезного действия ηн.
Если у трехфазной обмотки статора выведены начала и концы фаз и она может быть включена в звезду или треугольник, то ука-зываются линейные напряжения и токи для каждого из возможных соединений (Υ/Δ).
Кроме того, для двигателя с контактными кольцами приводится напряжение на разомкнутых кольцах при неподвижном роторе и линейный ток ротора в номинальном режиме.
Номинальные данные асинхронных двигателей варьируются в очень широких пределах. Номинальная мощность - от долей ватта до десятков тысяч киловатт. Номинальная синхронная частота вращения п1н = 60 f1/р при частоте сети 50 Гц от 3000 до 500 об/мин и менее в особых случаях; при повышенных частотах - до 100 000 об/мин и более (номинальная частота вращения ротора обычно на 2-5% меньше синхронной; в микродвигателях - на 5-20%). Номинальное напряжение от 24 В до 10 кВ (большие значения при больших мощностях).
Номинальный КПД асинхронных двигателей возрастает с ростом их мощности и частоты вращения; при мощности более 0,5 кВт он составляет 0,65-0,95, в микродвигателях 0,2-0,65.
Номинальный коэффициент мощности асинхронных двигателей, равный отношению активной мощности к полной мощности, потребляемой из сети,
также возрастает с ростом мощности и частоты вращения двигателей; при мощности более 1 кВт он составляет 0,7-0,9; в микродвигателях 0,3-0,7.
Общие сведения о режимах работы асинхронного двигателя.
В двигательном режиме разница частот вращения ротора и поля статора в большинстве случаев невелика и составляет лишь несколько процентов. Поэтому частоту вращения ротора оценивают не в абсолютных единицах (об/мин или об/с), а в относительных, вводя понятие скольжения:
s = (пс - п)/пс,
где пс - частота вращения поля (синхронная частота вращения); п - частота вращения ротора.
Скольжение выражается либо в относительных единицах (s = = 0,02; 0,025 и т. п.), либо в процентах (s - 2 %; 2,5 % и т. п.).
Частота тока и ЭДС, наводимая в проводниках обмотки ротора, зависят от частоты тока и ЭДС обмотки статора и от скольжения:
f2 - f1s; Е"2 - E1s,
где Е1- ЭДС обмотки статора; Е"2 - ЭДС обмотки ротора, приведенная к числу витков обмотки статора.
Рис. 2.1. Механическая характеристика асинхронной машины
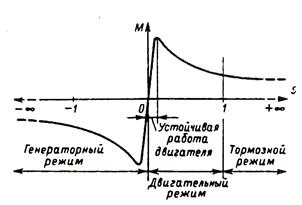
Теоретически асинхронная машина может работать в диапазоне изменения скольжения s = -∞...+∞ (рис. 2.1), но не при s = 0, так как в этом случае п - пс и проводники обмотки ротора неподвижны относительно поля статора, ЭДС и ток в обмотке равны нулю и момент отсутствует. В зависимости от практически возможных скольжений различают несколько режимов работы асинхронных машин (рис. 2.1): генераторный режим при s < 0, двигательный при 0 < s < 1, трансформаторный при s = 1 и тормозной при s > 1. В генераторном режиме ротор машины вращается в ту же сторону, что и поле статора, но с большей частотой. В двигательном - направления вращения поля статора и ротора совпадают, но ротор вращается медленнее поля статора: п = пс(1 - s). В трансформаторном режиме ротор машины неподвижен и обмотки ротора и статора не перемещаются относительно друг друга. Асинхронная машина в таком режиме представляет собой трансформатор и отличается от него расположением первичной и вторичной обмоток (обмотки статора и ротора) и наличием воздушного зазора в магнитопроводе. В тормозном режиме ротор вращается, но направление его вращения противоположно направлению поля статора и машина создает момент, противоположный моменту, действующему на вал. Подавляющее большинство асинхронных машин используют в качестве двигателей, и лишь очень небольшое количество - в генераторном и трансформаторном режимах, в тормозном режиме - кратковременно.
Для оценки механической характеристики асинхронного двигателя моменты, развиваемые двигателем при различных скольжениях, обычно выражают не в абсолютных, а в относительных единицах, т. е. указывают кратность по отношению к номинальному моменту: М* = M/Мном. Зависимость М* = f(s) асинхронного двигателя (рис. 2.2) имеет несколько характерных точек, соответствующих пусковому М*п, минимальному М*min, максимальному М*max и номинальному М*ном моментам.
Пусковой момент М*п характеризует начальный момент, развиваемый двигателем непосредственно при включении его в сеть при неподвижном роторе (s - 1). После трогания двигателя с места его момент несколько уменьшается по сравнению с пусковым (см. рис. 2.2). Обычно М*min на 10...15 % меньше М*п. Большинство двигателей проектируют так, чтобы их М*min был больше М*ном, так как они могут достигнуть номинальной скорости лишь при условии, что момент сопротивления, приложенный к валу, будет меньше, чем М*min .
Максимальный момент М*max характеризует перегрузочную способность двигателя. Если момент сопротивления превышает М*max, двигатель останавливается. Поэтому М*max называют также критическим, а скольжение, при котором момент достигает максимума, - критическим скольжением sкp. Обычно sкр не превышает 0,1...0,15; в двигателях с повышенным скольжением (крановых, металлургических и т. п.) sкp может быть значительно большим.
В диапазоне 0 < s < sкр характеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > sкр двигатель в нормальных условиях работать не может. Эта часть характеристики определяет пусковые свойства двигателя от момента пуска до выхода на рабочую часть характеристики.
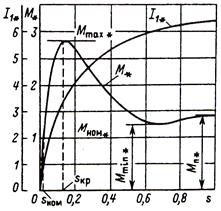
Рис. 2.2. Зависимость тока и момента асинхронного двигателя от скольжения
Трансформаторный режим, т. е. режим, когда обмотка статора подключена к сети, а ротор неподвижен, называют также режимом короткого замыкания двигателя. При s = 1 ток двигателя в несколько раз превышает номинальный, а охлаждение много хуже, чем при номинальном режиме. Поэтому в режиме короткого замыкания асинхронный двигатель, не рассчитанный для работы при скольжениях, близких к единице, может находиться лишь в течение нескольких секунд.
Режим короткого замыкания возникает при каждом пуске двигателя, однако в этом случае он кратковременен. Несколько пусков двигателя с короткозамкнутым ротором подряд или через короткие промежутки времени могут привести к превышению допустимой температуры его обмоток и к выходу двигателя из строя.
3. Аналитическое и графическое определение режимов работы асинхронной машины
Электромеханическое преобразование энергии может происходить в асинхронной машине в следующих трех режимах:
в режиме двигателя 0 < s < l, Ω1 > Ω > 0;
в режиме генератора s < 0, Ω > Ω1;
в режиме тормоза s > 1, Ω < 0.
Кроме того, важны еще два характерных режима работы, в которых электромеханическое преобразование энергии не происходит: режим идеального холостого хода (s = 0, Ω = Ω1) и режим короткого замыкания (s = 1, Ω = 0).
В режиме двигателя (область Д на рис. 3.2) под воздействием электромагнитного момента Μ > 0, направленного в сторону поля, ротор машины вращается в сторону поля со скоростью, меньшей, чем скорость поля (Ω1 > Ω > 0, 0 < s < 1). В этом режиме
Ρэм = ΜΩ1 =
> 0; Ρмех = ΜΩ = Ρэ2 > 0.Электрическая мощность Р1 = Рэм + Рм + Рэ1 > 0 преобразуется в механическую мощность Р2 = Рмех - Ρд - ΡΊ > 0, передаваемую через вал приводимой в движение машины.
Энергетические процессы в режиме двигателя иллюстрируются рис. 3.1, а, на котором направление активной составляющей тока ротора i2а совпадает с индуктированной в роторе ЭДС. Направление электромагнитного момента Μ определяется электромагнитной силой Bmi2a, действующей на ток i2a .
Полезная механическая мощность Р2 оказывается меньше потребляемой из сети мощности на потери ΣΡ:
Ρ2 = Ρ1-ΣΡ = Ρ1 -(Ρэ1 + Ρм+Ρэ2 + Ρд + Ρт),
И КПД двигателя выражается формулой:
= 1- = f(s)В режиме генератора (область Г на рис. 3.2) под воздействием внешнего момента Мв > 0, направленного в сторону поля (рис. 3.1, б), ротор машины вращается со скоростью, превышающей скорость поля (Ω > Ω1, s < 0). В этом режиме в связи с изменением направления вращения поля (Ω^) относительно ротора активная составляющая тока ротора г"2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент Μ = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М < 0), мощности Рэ„ и Ртх также отрицательны:
Ρэм = ΜΩ1 =
< 0; Ρмех = ΜΩ = Ρэ2 < 0.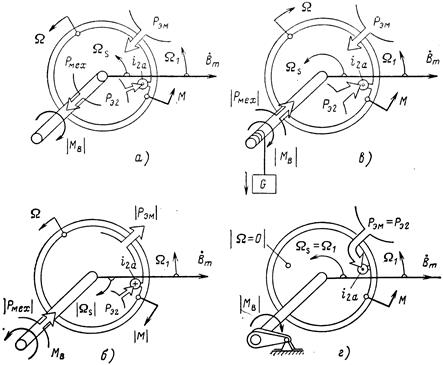
Рис. 3.1. Режимы работы асинхронной машины.
а - двигательный;
б - генераторный;
в - тормоза;
г - трансформатора (или короткого замыкания).
Направление преобразования энергии изменяется на обратное: механическая мощность Рг, подведенная к валу машины, преобразуется в электрическую мощность Plt поступающую в сеть. Поскольку мощность потерь всегда положительна (в любом режиме работы эти мощности превращаются в тепло), механическая мощность:
Ρмех = Ρэм - Ρэ2 < 0 при s < 0
по абсолютному значению больше, чем электромагнитная (рис. 3.2):
|Ρмех| = | Ρэм | + Ρэ2
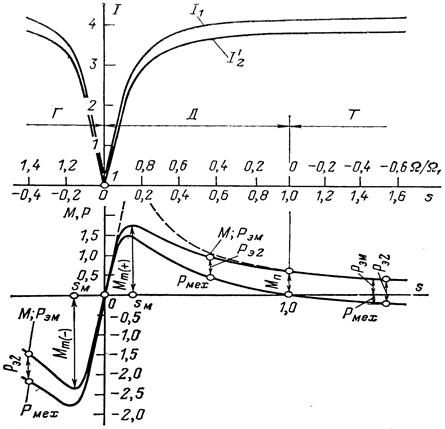
Рис. 3.2. Электромеханические характеристики асинхронной машины (в относительных единицах при 1/х = 1; /0 = 0,364; cos <р0 = 0,185; Хг = Х"2 = 0,125; Кг = 0,0375; R"s = 0,0425).
По той же причине потребляемая механическая мощность
P2 = P1 - ΣΡ < 0
по абсолютному значению на потери больше электрической мощности, отдаваемой в сеть:
|Ρ2| = | Ρ1 | + ΣΡ,
и КПД генератора
= 1-.В режиме тормоза (область Т на рис. 3.2) под воздействием внешнего момента Мв < 0, направленного против вращения поля (рис. 3.1, в), ротор машины вращается в сторону, противоположную полю (Ω<0, s =
>1). В этом режиме электромагнитный момент М, уравновешивающий внешний момент, как и в режиме двигателя (направление вращения поля Ω.5 относительно ротора остается таким же, как в режиме двигателя), направлен в сторону поля и считается положительным (М > 0). Однако, поскольку Ω < 0, механическая мощность оказывается отрицательной:Ρмех = ΜΩ = Ρэ2
< 0Это означает, что она подводится к асинхронной машине. Электромагнитная мощность в этом режиме положительна:
Ρэм = ΜΩ1 =
> 0Это означает, что она поступает из сети в машину.
Подведенные к ротору машины со стороны сети |Ρэм| и вала |Ρмех| мощности превращаются в электрические потери Рэ2 в сопротивлении ротора R"2 (рис. 3.2):
|Ρмех| + | Ρэм | = Ρэ2
+ Ρэ2 = Ρэ2 = m1 R"2(I "2)2 .Асинхронная машина в этом режиме может быть использована для притормаживания опускаемого подъемным краном груза. При этом мощность | Ρмех | = | ΜΩ | поступает в ротор машины (см. рис. 3.1).
В режиме идеального холостого хода внешний вращающий момент Μв, момент трения Μт = Ρт/Ω и момент, связанный с добавочными потерями, Мд = Ρд/Ω равны нулю. Ротор вращается со скоростью поля (Ω = Ω1, s = 0) и не развивает полезной механической мощности (М = 0, Рмех = ΜΩ = 0).
В режиме идеального холостого хода внешний момент, приложенный к валу машины, равен нулю (Мв = 0). Считается также, что отсутствует момент от трения вращающихся частей. Ротор машины вращается с той же угловой скоростью, что и вращающееся поле (Ω = Ω1), скольжение равно нулю (s = 0); ЭДС и токи в обмотке ротора не индуктируются (I2=0), и электромагнитный момент, уравновешивающий внешний момент и момент сил трения, равен нулю (М = 0).
Режим холостого хода асинхронной машины аналогичен режиму холостого хода трансформатора. В асинхронной машине и в трансформаторе ток в этом режиме имеется только в первичной обмотке I1 ≠ 0, а во вторичной - отсутствует (I2 = 0); в машине и в трансформаторе магнитное поле образуется в этом режиме только первичным током, что позволяет называть ток холостого хода намагничивающим током (I1 = I0). В отличие от трансформатора система токов I0 в фазах многофазной обмотки статора образует вращающееся магнитное поле.
= -.
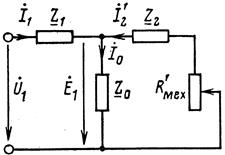
В режиме холостого хода R"мех = R"2
= ∞, ток R"2 = 0 и схема замещения содержит только одну ветвь Z1 + Z0 (Т-образная и Г-образная схемы не отличаются друг от друга).В режиме короткого замыкания под действием внешнего момента Μ в, уравновешивающего электромагнитный момент М, ротор удерживается в неподвижном состоянии (Ω = 0, s =
= 1) и не совершает полезной механической работы (Рмех = Μ Ω = 0).Направление тока i2a и электромагнитного момента Μ остается таким же, как в режиме двигателя, и Μ > 0 (см. рис. 3.1, г). Электромагнитная мощность Рэм = ΜΩ1 > 0 - она поступает в ротор из статора и превращается в электрические потери (Рэм = = Рэ2). В этом режиме асинхронная машина работает как коротко-замкнутый со вторичной стороны трансформатор, отличаясь от него только тем, что в ней существует вращающееся поле взаимной индукции вместо пульсирующего поля в трансформаторе.
В режиме короткого замыкания R"мех = R"2
= 0 и сопротивление схемы замещения по рис. 42-3 определяется параллельно включенными сопротивлениями Z1 + Z0 и Z1 + Z"2. Имея в виду, что |Z1 + Z"2| « |Z1 + Z0|, можно отбросить ветвь Z1 + Z0 и считать сопротивление схемы замещения при коротком замыкании равнымZк = Z1 + Z"2 = Rк + jXк (43-3)
Если к неподвижному ротору асинхронной машины подключить симметричную систему дополнительных сопротивлений R2д + jХ2д, то она будет работать как трансформатор, преобразующий электрическую энергию, поступающую из первичной сети, в электрическую энергию с другими параметрами, потребляемую дополнительными сопротивлениями R2д + jХ2д. Поэтому режим при s = 1 называется также режимом трансформатора.
Изменить режим работы асинхронной машины или скольжение машины в данном режиме (при U1 = const и f1 = const) можно только путем изменения внешнего момента Мв, приложенного к валу машины. При Мв = 0 ротор вращается со скоростью поля (Ω = Ω1, s = 0) и машина не совершает полезного преобразования энергии. При воздействии на вал ротора внешнего момента Мв, направленного против направления вращения поля, скорость ротора уменьшается до тех пор, пока не появится электромагнитный момент Μ = f(s), который уравновесит момент Мв. Машина переходит в режим двигателя s =
> 0. Наоборот, при воздействии внешнего момента Мв направленного по вращению поля, скорость ротора делается большей, чем скорость поля (Ω > Ω1), и машина переходит в режим генератора (s=<0).Наконец, к режиму тормоза можно перейти из режима двигателя, изменяя внешний момент Мв таким образом, чтобы ротор сначала остановился, а затем пришел во вращение в противоположную сторону (по отношению к полю).
Список литературы
Иванов-Смоленский А. В. Электрические машины: Учебник для вузов. – М.: Энергия, 1980. – 928 с., ил.
Вольдек А. И. Электричесие машины. Учебник для студентов высших учебн. Заведений. Л., «Энергия», 1974.
Проектирование электрических машин: Учеб. Для вузов / Под ред. И. П. Копылова. М.: Высш. Шк., 2002. – 757 с.: ил.
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных навигационных систем на электростатических гироскопах. Сущность изобретения: по результатам изменений уходов ротора гироскопа на двух частотах вращения ротора при двух положениях ротора в вакуумной камере определяется номинальная частота вращения ротора, при которой он становится интегрально сферическим (номинальная частота вращения). Изобретение позволяет уменьшить влияние на уходы ротора электростатического гироскопа таких факторов, как нестабильность следящих систем подвеса, заряд ротора, погрешность следящих систем списывания углового положения, что повышает точность гироскопа. 1 ил.
Рисунки к патенту РФ 2269745
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных навигационных систем на электростатических гироскопах (ЭСГ) с тонкостенным ротором, поверхность которого выполнена в форме вытянутого к полюсам эллипсоида.
Известен способ нахождения расчетным путем величины разности осей такого эллипсоида, чтобы при вращении с номинальной частотой форма его поверхности под действием центробежных сил стала сферической. Способ описан в статье Ю.Г.Мартыненко и В.В.Подалкова «Асферизация полого ротора электростатического гироскопа» (сборник «Гироскопия и навигация», выпуск 2, 1997 год).
Дальнейшая эксплуатация гироскопа проводится при расчетной частоте вращения ротора. Данный способ принят в качестве прототипа предлагаемого изобретения.
Недостатком такого способа является то, что расчет не учитывает ряд факторов, влияющих на точность определения частоты вращения ротора, при которой он нечувствителен к изменению пондеромоторных сил. К этим факторам следует отнести:
Разброс входящих в расчетные формулы параметров материала ротора (плотности, модуля упругости и др.);
Поле допусков при изготовлении ротора;
Влияние на точность ЭСГ высших гармоник формы поверхности ротора.
Все эти факторы снижают потенциальную точность ЭСГ, т.к. несовпадение формы поверхности ротора со сферой приводит к появлению момента от действия пондеромоторных сил, направленных по нормали к поверхности, и, следовательно, к возникновению уходов гироскопа.
Известно (монография Ю.Г.Мартыненко «Движение твердого тела в электрических и магнитных полях», Москва, «Наука», 1998 год), что при линейном смещении несферического ротора ЭСГ относительно электродов подвеса изменяется его скорость ухода вследствие перераспределения по поверхности пондеромоторных сил. Если при линейном смещении ротора изменения скорости ухода нет, следует считать, что ЭСГ инвариантен к изменению пондеромоторных сил, т.е. ротор такого ЭСГ интегрально сферический.
Задачей настоящего изобретения является определение частоты вращения ротора, при которой он становится интегрально сферическим (номинальной частоты вращения), что уменьшает уводящие моменты от пондеромоторных сил, а следовательно, повышает точность гироскопа.
Поставленная задача решается последовательностью операций:
1. ЭСГ устанавливают в прибор, позволяющий определять скорость ухода ротора (например, в гироориентатор), так, чтобы ось вращения ротора находилась в плоскости Земного экватора.
2. Ротор взвешивают в вакуумной камере при помощи пространственной системы подвеса и разгоняют до расчетной частоты вращения f 1 .
3. Прибор, в который установлен ЭСГ, приводят в рабочий режим.
4. Определяют скорость ухода ротора n 11 по накопленному углу вплоскости Земного экватора.
5. Смещают ротор в вакуумной камере вдоль оси, расположенной по оси вращения ротора, введением дополнительного электрического напряжения на вход следящей системы координаты подвеса по этой оси.
6. Определяют скорость ухода ротора n 12 .
7. Разгоняют ротор до частоты вращения f 2 .
8. Определяют скорость ухода ротора n 21 .
9. Снимают дополнительное электрическое напряжение.
10. Определяют скорость ухода ротора n 22 .
11. Вычисляют номинальную частоту вращения ротора, при которой он становится интегрально сферическим, по формуле:
12. Доводят частоту вращения ротора до номинальной.
Вывод формулы поясняется чертежом, где обозначено:
f 1 - расчетная частота вращения ротора;
f 2 - частота вращения ротора после разгона (торможения);
f н - частота вращения ротора, при которой он становится интегрально сферичным;
A, B, C, D, E - вершины треугольников;
(n 12 -n 11) - разность скоростей ухода ротора после и до линейного смещения на частоте вращения ротора f 1 ;
(n 22 -n 21) - разность скоростей ухода ротора после и до линейного смещения на частоте вращения ротора f 2 .
Из подобия треугольников ABD и АСЕ:
Решая эту пропорцию, получим вышеприведенную формулу.
На предприятии ЦНИИ «Электроприбор» предлагаемое техническое решение осуществлено.
ЭСГ устанавливается в двухосный гиростабилизатор, ротор ЭСГ взвешивается в вакуумной камере с помощью трехосной следящей системы, раскручивается до расчетной частоты вращения (f 1), определяемой конструкторской документацией, при помощи демпфирующей катушки ось ротора выставляется в плоскость Земного экватора. Затем включаются следящие системы кардановых колец, наблюдается движение ротора и определяется по накопленному углу скорость ухода на расчетной частоте вращения (n 11). Далее ротор смещается вдоль оси вращения, с помощью дополнительного электрического напряжения, вводимого в координату следящей системы подвеса ротора, управляющую его линейным перемещением вдоль оси вращения, и снова определяется скорость ухода на расчетной частоте вращения (n 12).
Следующей операцией ротор разгоняется до частоты вращения выше расчетной (f 2), проводится измерение скорости ухода ротора (n 21) на частоте выше расчетной, после чего дополнительное электрическое напряжение снимается и вновь определяется скорость ухода ротора (n 22).
По формуле (1) находится номинальная частота вращения ротора (f н) и частота вращения ротора доводится до номинальной (f н).
Реализация этого способа в ЦНИИ "Электроприбор" позволила повысить точность ЭСГ в 3-5 раз.
Технико-экономическая эффективность изобретения заключается в повышении точности ЭСГ.
В связи с отсутствием сведений о потребностях страны в количестве таких гироскопов экономический эффект изобретения подсчитать не представляется возможным.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Способ определения номинальной частоты вращения ротора электростатического гироскопа, содержащего тонкостенный ротор, внешняя поверхность которого выполнена в форме вытянутого к полюсам эллипсоида вращения с определенной расчетным путем величиной разности осей эллипсоида, заключающийся в том, что электростатический гироскоп устанавливают в прибор, позволяющий определять скорость ухода ротора, ось вращения ротора выставляют в плоскость Земного экватора, ротор взвешивают в вакуумной камере при помощи пространственной следящей системы подвеса, осуществляют разгон ротора до расчетной частоты вращения f 1 , после приведения прибора, в котором установлен гироскоп, в рабочий режим определяют скорость ухода n 11 по накопленному углу в плоскости Земного экватора, отличающийся тем, что ротор смещают по направлению оси вращения введением дополнительного электрического напряжения на вход следящей системы координаты подвеса, расположенной вдоль оси вращения ротора, измеряют скорость ухода ротора n 12 , разгоняют ротор до частоты вращения f 2 , измеряют скорость ухода n 21 , снимают дополнительное электрическое напряжение, измеряют скорость ухода ротора n 22 , определяют номинальную частоту вращения ротора по формуле
и доводят частоту вращения ротора до номинальной.