Лінійні асинхронні двигуни. Ліненйний асинхронний двигун - реферат
1. Введення.
2. Лінійний асинхронний двигун.
2.1 Конструкція і принцип дії.
2.2 Різновиди.
2.2.2 дугового двигун.
2.2.3 Трубчастий двигун.
2.3 Застосування.
3. Лінійний двигун постійного струму.
3.1 Конструкція і принцип дії.
3.2 Застосування.
4. Лінійний синхронний двигун.
4.1 Застосування.
5. Висновок.
1. Введення.
Цікаві і широкі перспективи розвитку електроприводу пов'язані із застосуванням так званих лінійних двигунів.
Велике число виробничих механізмів та пристроїв мають поступальний або зворотно-поступальний рух робочих органів (підйомно-транспортні машини, механізми подач різних верстатів, преси, молоти і т.д.). В якості приводу цих механізмів і пристроїв використовувалися звичайні електродвигуни в поєднанні зі спеціальними видами механічних передач (кривошипно-шатунний механізм, передача гвинт-гайка), перетворили обертальний рух робочого органу.
Лінійні двигуни можуть бути асинхронними, синхронними і постійного струму, повторюючи за принципом своєї дії відповідні двигуни обертального руху.
2. Лінійний асинхронний двигун.
2.1 Конструкція і принцип дії.
Найбільшого поширення набули асинхронні лінійні двигуни. Подання про устрій лінійного асинхронного двигуна можна отримати, якщо подумки розрізати (рис. 1) статор 1 і ротор 4 з обмотками 2 і 3 звичайного асинхронного двигуна уздовж осі по котра утворює і розгорнути в площину, як це показано на малюнку. Новоутворена «плоска» конструкція являє собою принципову схему лінійного двигуна. Якщо тепер обмотки 2 статора такого двигуна підключити до мережі змінного струму, То утворюється магнітне поле, вісь якого буде переміщатися уздовж повітряного зазору зі швидкістю, пропорційною частоті напруги живлення і довжині полюсного поділу. Це переміщається уздовж зазору магнітне поле перетинає провідники обмотки 3 ротора і індукує в них ЕРС, під дією якої по обмотці почнуть протікати струми. Взаємодія струмів з магнітним полем призведе до появи сили, що діє, за відомим правилом Ленца, в напрямку переміщення магнітного поля. Ротор - надалі будемо називати його вже вторинним елементом - під дією цієї сили почне рухатися з деяким відставанням (ковзанням) від магнітного поля, як і в звичайному асинхронному двигуні.
2.2 Різновиди.
2.2.1 Конструктивні параметри.
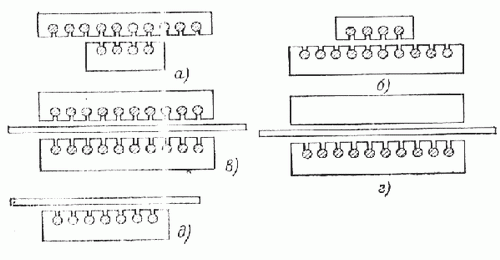
Представлена \u200b\u200bна рис. 2 конструкція являє собою лінійний двигун з однаковими розмірами статора і вторинного елемента. Крім такої конструкції, в залежності від призначення лінійного двигуна вторинний елемент може бути довшим статора (рис. 2а) або коротше його (рис. 2б). Такі двигуни отримали відповідно назва двигунів з коротким статором і коротким вторинним елементом. Вторинний елемент лінійного двигуна не завжди забезпечується обмоткою. Часто - і в цьому одна з переваг лінійного асинхронного двигуна - як вторинної елемента використовується металевий лист (смуга), як показано на рис. 2д. Вторинний елемент при цьому може розташовуватися також між двома статорами (рис. 2в) або між статором і феромагнітним сердечником (рис. 2г). Двигун з конструктивною схемою, наведеної на рис. 2д, отримав назву двигуна з одностороннім статором, зі схемою по рис. 2в - з двостороннім статором і зі схемою по рис. 2г - з одностороннім статором і сердечником. Вторинний елемент виконується з міді, алюмінію або сталі, причому використання не магнітного вторинного елемента передбачає застосування конструктивних схем з замиканням магнітного потоку через феромагнітні елементи, як, наприклад, на рис. 2в, м Деяке поширення отримали складні складові вторинні елементи з прилеглими один до одного смугами з немагнітного і феромагнітного матеріалу, при цьому феромагнітна смуга виконує роль частини муздрамтеатру. Принцип дії лінійних двигунів з вторинним елементом у вигляді смуги повторює роботу звичайного асинхронного двигуна з масивним феромагнітним або порожнистим немагнітним ротором. Обмотки статора лінійних двигунів мають ті ж схеми з'єднання, що і звичайні асинхронні двигуни, і підключаються зазвичай до мережі трифазного змінного струму. Відзначимо, що лінійні двигуни дуже часто працюють в так званому зверненому режимі руху, коли вторинний елемент нерухомий, а пересувається статор. Такий лінійний двигун, який отримав назву двигуна з рухомим статором, знаходить, зокрема, широке застосування на електричному транспорті.
2.2.2 дугового двигун.
Дугового двигун характеризується розташуванням обмотки на частини окружності, як це показано на рис. 3.Особенности цього двигуна є залежність частоти обертання його статора 1 від довжини дуги, на якій розташовуються обмотки 2 статора 3.
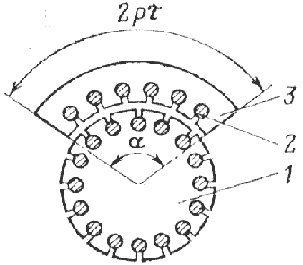
Нехай обмотки статора розташовуються на дузі, довжина якої відповідає центральному куту α \u003d 2τр, де τ - довжина полюсного поділу та p - число пар полюсів. Тоді за один період струму обертається поле статора зробить поворот на кут 2τр / р \u003d α / р, а протягом однієї хвилини поле повернеться на n \u003d α / p * 60f / 2π оборотів, т. Е. Буде мати частоту обертання n, об / хв.
Вибираючи різні α, можна виконувати дугові двигуни з різними частотами обертання ротора.
2.2.3 Трубчастий двигун.
Конструкція трубчастого лінійного двигуна представлена \u200b\u200bна рис. 4.
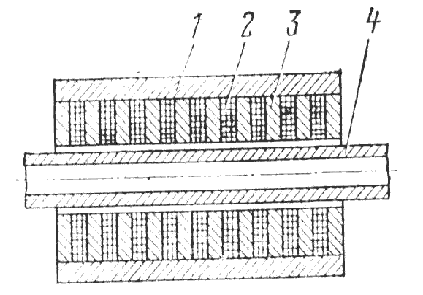
Статор двигуна 1 має вигляд труби, всередині якої розташовуються перемежовуються між собою плоскі дискові котушки 2 (обмотки статора) і металеві шайби 3, що є частиною муздрамтеатру. котушки двигуна з'єднуються групами і утворюють обмотки окремих фаз двигуна. Усередині статора поміщається вторинний елемент 4 також трубчастої форми, виконаний з феромагнітного матеріалу.
При підключенні до мережі обмоток статора уздовж його внутрішньої поверхні утворюється біжить магнітне поле, яке індукує в тілі вторинного елемента струми, спрямовані на його окружності. Взаємодія цих струмів з магнітним полем двигуна створює на вторинному елементі силу, що діє вздовж труби, яка і викликає (при закріпленому статорі) рух вторинного елемента в цьому напрямку. Трубчаста конструкція лінійних двигунів характеризується осьовим напрямком магнітного потоку на відміну від плоского лінійного двигуна, в якому магнітний потік має радіальний напрямок.
2.3 Застосування.
Широке застосування лінійні двигуни знайшли в електричному транспорті, чому сприяв цілий ряд переваг цих двигунів. Одне з них, вже відзначене вище, визначається прямолінійністю руху вторинного елемента (або статора), що природно поєднується з характером руху транспортних засобів.
Інше, не менш важлива обставина пов'язано з незалежністю сили тяги від сили зчеплення коліс з рейковим шляхом, що недосяжно длят звичайних систем електричної тяги. Тому прискорення і швидкості руху транспортних засобів при використанні лінійних двигунів можуть бути як завгодно високими і обмежуватися тільки комфортабельністю руху, допустимою швидкістю кочення коліс по рейковому шляху і дорозі, динамічної стійкістю ходової частини транспорту та шляхи. Виключається при використанні лінійних двигунів і буксування коліс електричного транспорту.
Одна з можливих конструктивних схем зчленування лінійного двигуна з рейковим транспортним засобом показана на рис. 5.
Лінійний двигун, укріплений на візку 3 рухомого складу, має конструкцію з двостороннім статором 1. Вторинним елементом є укріплена між рейками смуга 2. Напруга на статор двигуна подається за допомогою ковзних контактів. Відомі також конструкції лінійних двигунів, де вторинним елементом є рейок і елементи несучої конструкції. Такі схеми характерні, зокрема, для монорейкових пасажирських і вантажних доріг і механізмів пересування кранів. На рис. 6 як приклад показані вітчизняний лінійний двигун, сконструйований для монорельсової дороги. Цей двигун має двосторонній статор 1 з обмоткою 2, всередині якого знаходиться вторинний елемент у вигляді смуги 3. Статор двигуна переміщається по смузі за допомогою несучих роликів 5. Ролики 4 служать для взаємної фіксації статора і вторинного елемента в горизонтальному напрямку.
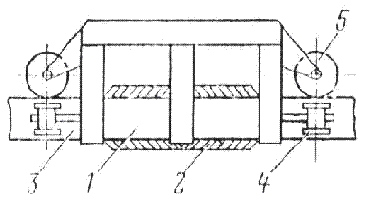
Рис. 6
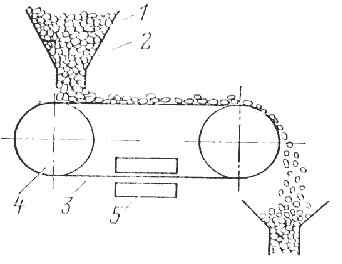
Рис. 7
На рис. 7 показаний приклад використання лінійних асинхронних двигунів для механізмів транспортування вантажів різних виробів.
Конвеєр, призначений для переміщення сипучих матеріалів 1 з бункера 2, має металеву стрічку 3, укріплену на барабанах 4. Металева стрічка проходить всередині статоров 5-го лінійного двигуна, будучи вторинним елементом. Застосування лінійного двигуна в цьому випадку дозволяє знизити попередній натяг стрічки і усунути її прослизання, підвищити швидкість і надійність роботи конвеєра.
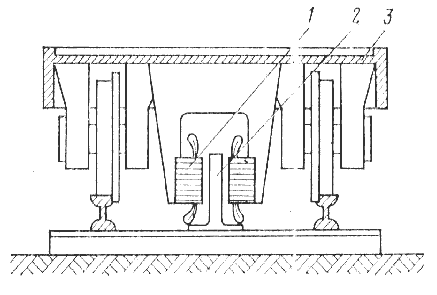
Великий інтерес представляє використання лінійного двигуна для машин ударної дії, наприклад сваезабівних молотів, що застосовуються при дорожніх роботах і будівництві. Конструктивна схема такого молота, показана на рис. 8.Статор лінійного двигуна 1 розташовується на стрілі молота 2 і може переміщатися по напрямних стріли в вертикальному напрямку за допомогою лебідки 3. Ударна частина молота 4 є одночасно вторинним елементом двигуна.
Для підйому ударної частини молота двигун включається таким чином, щоб біжить поле було направлено вгору. При підході ударної частини до крайнього верхнього положення двигун відключається і ударна частина опускається вниз на палю під дією сили тяжіння. У деяких випадках двигун не відключається, а реверсують, що дозволяє збільшити енергію удару. У міру заглиблення палі статор двигуна переміщається вниз за допомогою лебідки.
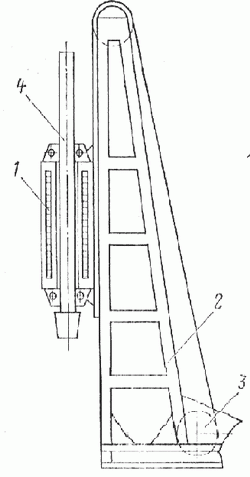
Рис. 8
Електричний молот, простий у виготовленні, не вимагає підвищеної точності виготовлення двигунів, не чутливий до зміни температури і може вступати в роботу практично миттєво.
3. Лінійний двигун постійного струму.
Поряд з асинхронними лінійними двигунами застосовуються лінійні двигуни постійного струму. Вони найчастіше використовуються для отримання невеликих переміщень робочих органів і забезпечення при цьому високої точності і значних пускових зусиль.
3.1 Конструкція і принцип дії.
Лінійні електродвигуни постійного струму складається з якоря з розташованої на ньому обмоткою, яка є одночасно колектором (направляючий елемент), і разомкнутого муздрамтеатру з обмотками збудження (рухома частина), розташованими так, що вектори сил, що виникають під полюсами муздрамтеатру, мають однаковий напрямок. Крім того, лінійні двигуни постійного струму (як і двигуни обертального руху) дозволяють при необхідності просто регулювати швидкість руху робочих органів.
3.2 Застосування.
На рис. 9 показана схема лінійного двигуна постійного струму, який застосовується для переміщення промислових виробів. Цей двигун по суті являє собою двигун постійного струму з порожнистим циліндричним якорем, розрізаний за твірною і розгорнутий в площину.
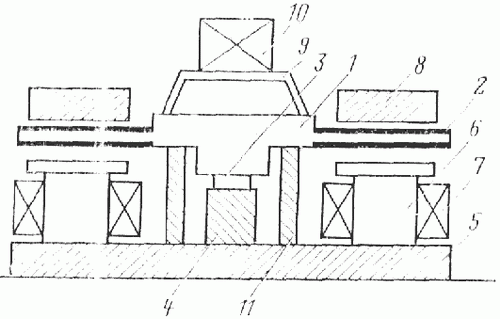
Рис. 9
Рухома частина двигуна - якір - складається з немагнітного остова 1 і укріпленої на ньому обмотки 2 якоря, яка може бути виконана з ізольованого обмотувального проводу або виготовлена \u200b\u200bз мідної фольги шляхом її травлення. Ширина витків обмотки в напрямку руху, як і в звичайних двигунах постійного струму, близька до полюсного поділу (т. Е. Віддалі по колу між полюсами магнітної системи двигуна). Струмопровід до обмотці здійснюється за допомогою колектора 3 і щіток 4. На станині двигуна 5 кріпиться комплект полюсів 6 з обмотками збудження 7, розміщених в ряд у напрямку руху якоря. Іншими частинами магнітопровода двигуна є сталеві сердечники 8 і сама станина, виконана також з феромагнітного матеріалу. Якір двигуна разом зі столиком 9 для кріплення переміщуваного вироби 10 рухається по нерухомих опор 11 так, що його площині з обмотками весь час знаходяться в зазорі між сердечниками 8 і полюсами 6. На принципі роботи лінійного двигуна заснована дія спеціальних насосів для перекачування електропровідних рідин і в тому числі рідких металів. Такі насоси, часто звані магнітогідродинамічними, широко застосовуються в металургії для транспортування, дозування та перемішування рідкого металу, а також на атомних електростанціях для перекачування жидкометаллического теплоносія.
Магнітогідродинамічні насоси (МГД - насоси) можуть бути постійного або змінного струму. Розглянемо схему насоса постійного струму.
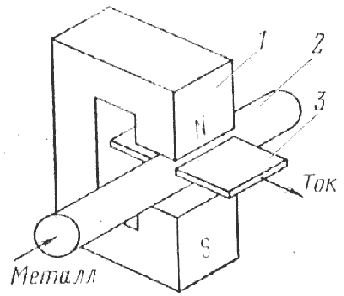
Первинним елементом - статором двигуна є С - подібний електромагніт 1. У повітряний зазор електромагніту поміщається трубопровід 2 з рідким металом. За допомогою електродів 3, приварених до стінок трубопроводу, через рідкий метал пропускається постійний струм від зовнішнього пристрою. Часто обмотка збудження включається послідовно в ланцюг електродів 3. При порушенні електромагніту на метал в зоні проходження постійного струму починає діяти електромагнітна сила. Під дією цієї сили метал почне переміщатися по трубопроводу, причому напрямок його руху просто визначити за відомим правилом лівої руки. Перевагами МГД - насосів є відсутність рухомих механічних частин, і можливість герметизації каналу транспортування металу.
4. Лінійний синхронний двигун.
В останні роки все ширше використовуються синхронні лінійні двигуни. Основною областю застосування цих двигунів, де їх переваги проявляються особливо сильно, є високошвидкісний електричний транспорт. Справа в тому, що за умовами нормальної експлуатації такого транспорту необхідно мати порівняно великий повітряний зазор між рухомою частиною і вторинним елементом. Асинхронний лінійний двигун має при цьому дуже низький коефіцієнт потужності, і його застосування виявляється економічно не вигідним. Синхронний лінійний двигун, навпаки, допускає наявність щодо великого повітряного зазору між статором і вторинним елементом і працює при цьому з коефіцієнтом потужності, близьким до одиниці.
Слід зазначити, що застосування синхронних лінійних двигунів у високошвидкісному транспорті поєднується, як правило, з так званої магнітною підвіскою вагонів і застосуванням надпровідних магнітів і обмоток збудження, що дозволяє підвищити комфортабельність руху і економічні показники роботи рухомого складу.
4.1 Застосування.
На рис. 11 показана схема шляхопроводу і вагона електропоїзда зі швидкістю руху 400 - 500 км / ч, призначеного для перевезення 100 пасажирів.
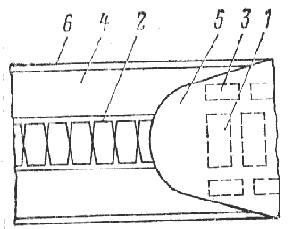
Рис. 11
Тяговий синхронний лінійний двигун має електромагнітне збудження з використанням надпровідних магнітів. Обмотка збудження 1 складається з ряду котушок, рівномірно укріплених під днищем вагона 5. У кріогенної системи охолодження обмоток використовується рідкий гелій. Плоска трифазна обмотка змінного інвертора, Що перетворює напруги постійного струму в трифазне напругу змінного струму.
За допомогою інвертора здійснюється пуск, зміна швидкості руху і гальмування поїзда.
Шляхопровід 6 являє собою бетонне полотно, плоский характер поверхні якого обраний з метою зниження накопичення льоду і снігу. Вагон підвішується над полотном дороги на висоті 15 см за допомогою спеціальної системи магнітної підвіски. Ця система складається з подовжених надпровідних електромагнітів 3, розташованих по краях днища вагона, з плоских алюмінієвих смуг 4, укріплених в полотні дороги. Принцип роботи системи магнітної підвіски ґрунтується на дії електродинамічних сил, що виникають при взаємодії потоків надпровідних електромагнітів 3 на борту вагона і вихрових струмів, наведених в алюмінієвих смужках 4. Розрахунки показали, що при використанні магнітної підвіски маса вагона виявляється на 20 т менше, ніж при системі підвіски на повітряній подушці.
Для забезпечення поперечної стійкості поїзда при його русі застосовується спеціальна система стабілізації. Вона передбачає укладання додаткової обмотки уздовж осі дорожнього полотна і заснована на взаємодії струмів в цій обмотці з полем тягових електромагнітів. Розроблена система електричної тяги із застосуванням описаного вище синхронного лінійного двигуна відрізняється хорошими експлуатаційними показниками, проте для її роботи необхідна укладка обмоток в полотно дороги, що здорожує виготовлення системи і ускладнює її обслуговування, особливо при значній протяжності дороги. У зв'язку з цим були розроблені конструкції лінійних синхронних двигунів, які не вимагають укладання обмоток в залізничне полотно. До їх числа відносяться лінійні синхронні двигуни з так званим уніполярним збудженням і кігтеподібні полюсами. Двигуни того і іншого виконання були використані для приводу 50 - тонного складу зі швидкістю руху 480 км / год.
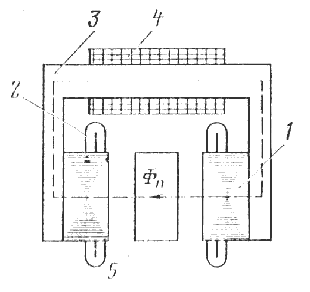
На рис. 12 показана схема синхронного лінійного двигуна з уніполярним збудженням. Двигун має два статора 1, встановлених на рухомої частини складу. Біжить магнітне поле створюється за допомогою обмоток 2, що підключаються до мережі змінного струму. Статори з'єднуються магнитопроводом 3, на якому розташована обмотка униполярного збудження 4. Ця обмотка створює постійний по напрямку магнітний потік, який пронизує феромагнітний вторинний елемент 5, що укладається в муздрамтеатр. Взаємодія біжить магнітного поля з намагніченим вторинним елементом створює силу тяги рухомого складу.
Зіставлення лінійних синхронних двигунів з уніполярним збудженням і кігтеподібні полюсами з асинхронним лінійним двигуном на той же тягове зусилля показало, що останній має найгірший коефіцієнт потужності (близько 0,6), більш низький ККД (близько 80%) і велику масу на одиницю потужності двигуна.
5. Висновок.
Застосування лінійних електродвигунів дозволяє спростити або повністю виключити механічну передачу, підвищити економічність і надійність роботи приводу і виробничого механізму в цілому.
6. Список літератури.
1. В.В. Маскаленко, Електричні двигуни спеціального призначення, Енергоіздат тисячу дев'ятсот вісімдесят одна.
2. Кавалёв Ю.М., Електричні машини, - М .: Енергія, 1989.
Переважна більшість електродвигунів є електродвигунами обертального руху. У той же час багато робочі органи виробничих машин повинні за технологією своєї роботи здійснювати поступальний (наприклад, конвеєри, транспортери та ін.) Або зворотно-поступальний рух (механізми подачі верстатів, маніпулятори, поршневі і інші машини).
Перетворення обертального руху в поступальний здійснюється за допомогою спеціальних кінематичних ланок: гвинт-гайка, кулько-гвинтові передача, шестерня-зубчаста рейка, кривошипно-шатунная передача та інші.
Природним для конструкторів робочих машин є бажання використовувати для приводу робочих органів, що здійснюють поступальний і зворотно-поступальний рух, двигунів, ротор яких рухається лінійно.
В даний час отримують розвиток електроприводи, що використовують лінійні асинхронні, вентильні і. Принципово лінійний двигун будь-якого типу може бути утворений з двигуна обертального руху шляхом лінійної розгортки циліндричного статора в площину.
Подання про устрій лінійного асинхронного двигуна можна отримати, якщо розгорнути статор асинхронного двигуна в площину. При цьому вектор намагнічують сил статора буде лінійно переміщатися уздовж розгортки статора, тобто при цьому утворюється не обертається (як в звичайних двигунах), а біжить електромагнітне поле статора.
В якості вторинного елемента може використовуватися феромагнітна смуга, що розташовується з невеликим повітряним зазором уздовж розгортки статора. Ця смуга грає роль короткозамкнутого ротора. Вторинний елемент захоплюється рухомим полем статора і лінійно переміщується зі швидкістю, меншою швидкості руху поля статора на величину лінійного абсолютного ковзання.
Лінійна швидкість біжить електромагнітного поля буде
![]()
де τ, м - полюсное розподіл - відстань між сусідніми полюсами лінійного асинхронного двигуна.
Швидкість вторинного елемента
![]()
де Sл - відносне лінійне ковзання.
При харчуванні двигуна напругою стандартної частоти одержувані швидкості поля будуть досить великі (понад 3 м / с), що ускладнює використання цих двигунів для приводу промислових механізмів. Такі двигуни застосовуються для високошвидкісних транспортних механізмів. Для отримання більш низьких швидкостей руху та регулювання швидкості лінійного асинхронного двигуна його обмотки живлять від перетворювача частоти.
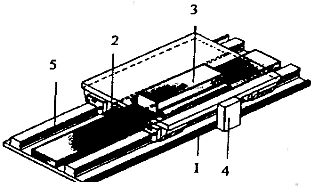
Рис. 1. Конструкція лінійного Однокоординатний двигуна.
Застосовуються кілька варіантів конструкцій лінійного асинхронного двигуна. Одна з них показана на рис. 1. Тут вторинний елемент (2) - смуга, з'єднаний з робочим органом, переміщається по напрямних 1 під дією біжить електромагнітного поля, створюваного статором 3. Така конструкція зручна для компонування з робочою машинної, однак, вона пов'язана зі значними потоками розсіювання поля статора, внаслідок чого cosφ двигуна буде низьким.
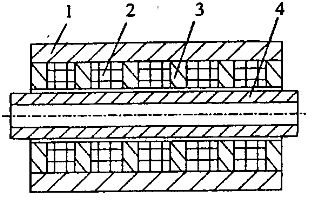
Рис.2. Лінійний двигун циліндричної конструкції
Для збільшення електромагнітного зв'язку між статором і вторинним елементом, останній розміщують в проріз між двома статорами, або конструкція двигуна виконується у вигляді циліндра (див. Рис. 2). В цьому випадку статор двигуна являє собою трубку (1), всередині якої розташовані циліндричні складальні котушки (2), що є обмоткою статора. Між котушками розміщені феромагнітні шайби 3, що є частиною муздрамтеатру. Вторинний елемент - шток трубчастої форми також виконаний з феромагнітного матеріалу.
Лінійні асинхронні двигуни можуть також мати звернену конструкцію, коли вторинний елемент нерухомий, а переміщається статор. Такі двигуни зазвичай застосовуються на транспортних засобах. У цьому випадку в якості вторинного елемента використовується рейок або спеціальна смуга, а статор розміщується на рухомому візку.
Недоліком лінійних асинхронних двигунів є низький ККД і пов'язані з цим втрати енергії, перш за все, у вторинному елементі (втрати ковзання).
В останнім часом крім асинхронних почали застосовуватися. Конструкція лінійного двигуна такого типу аналогічна представленої на рис. 1. Статор двигуна розгорнуто в площину, а на вторинному елементі розміщуються постійні магніти. Можливий варіант зверненої конструкції, коли статор є рухомою частиною, а вторинний елемент з постійними магнітами нерухомий. Перемикання обмоток статора проводиться в залежності від відносного положення магнітів. З цією метою в конструкції передбачений датчик положення (4 - на рис. 1).
Для позиційних приводів ефективно застосовуються також лінійні крокові двигуни. Якщо розгорнути в площину статор крокової двигуна, а вторинний елемент виконати у вигляді пластини, на якій шляхом фрезерування канавок утворені зубці, то при відповідному перемиканні обмоток статора вторинний елемент буде здійснювати дискретне рух, крок якого може бути досить малим - до часток міліметра. Часто застосовується звернена конструкція, в якій вторинний елемент нерухомий.
Швидкість лінійного крокової двигуна визначається величиною зубцевого поділу τ, числом фаз m і частотою перемикання
Отримання високих швидкостей руху не викликає труднощів, оскільки збільшення зубцевого ділення і частоти не лімітується технологічними факторами. Обмеження існують для мінімального значення τ, тому що ставлення зубцевого ділення до величини зазору між статором і вторинним елементом має бути не менше 10.

Використання дискретного приводу дозволяє не тільки спростити конструкцію механізмів, що здійснюють лінійне Однокоординатний рух, а й дає можливість за допомогою одного приводу отримати двох або багатокоординаційно рух. Якщо на статорі рухомої частини розташувати ортогонально дві системи обмоток, а у вторинному елементі виконати канавки в двох перпендикулярних напрямках, то рухливий елемент буде здійснювати дискретне рух в двох координатах, тобто забезпечувати переміщення на площині.
В цьому випадку виникає задача створення опори для рухомого елемента. Для її вирішення може використовуватися повітряна подушка - натиск повітря, що подається в просторі під рухомим елементам. Лінійні крокові двигуни розвивають відносно низьке тягове зусилля і мають низький ККД Основною областю їх застосування є легкі маніпулятори, легкі складальні верстати, вимірювальні машини, верстати для лазерного різання і інші пристрої.
Приклади ВИКОРИСТАННЯ ЛІНІЙНИХ ЕЛЕКТРОДВИГУНІВ
Рахімов Андрій Валерійович
Ставропольський державний аграрний університет
анотація
У статті дається визначення поняття лінійний електродвигун. це електричний двигун з одним розімкненим елементом магнітної системи, обмотка якого розгорнута. Обмотка створює магнітне поле, з яким взаємодіє другий елемент магнітної системи, виконаний як напрямна деталь, що забезпечує переміщення рухомої частини лінійного електродвигуна. Дається класифікація лінійних електродвигунів. Основні з них - синхронні, асинхронні, електромагнітні, магнітоелектричні, магнітострикційні і п'єзоелектричні лінійні двигуни. Розглядається будова лінійних електродвигунів. У лінійному електродвигуні існує дві частини: первинна - нерухома, що отримала назву «статор», і вторинна - рухлива, що отримала назву «якір». Якір електродвигуна отримує енергію від статора через магнітне поле. Лінійний електродвигун є основною частиною прямого електроприводу. Він створений для перетворення електричної енергії в енергію поступального руху. Такий електропривод складається з коштів управління і зміни швидкості, що значно спрощує конструкцію виконавчих органів і дозволяє вдосконалити різні технологічні процеси. Лінійні електродвигуни поділяються на асинхронні і синхронні. В асинхронному лінійному електродвигуні реактивна смуга, виконана у вигляді бруска прямокутного перетину без обмоток, закріплена вздовж шляхопроводу, над яким переміщається електровоз, що переміщає рухому частину (індуктор) двигуна. Його магнітопровід виконаний з розгорнутими багатофазними обмотками, що живляться від джерела змінного струму. Завдяки взаємодії магнітного поля індуктора з полем реактивної смуги, виникають сили, що змушують переміщатися з прискоренням індуктор відносно нерухомої реактивної смуги. Це переміщення відбувається до тих пір, поки швидкості переміщення індуктора і біжить магнітного поля реактивної смуги незрівняються. Перевагою такої конструкції є розміщення простіший у виготовленні реактивної смуги. У статті розглядається актуальність впровадження лінійних електродвигунів в сучасні технологічні процеси, розкриваються переваги і недоліки даних електричних машин, наводяться приклади використання лінійних електродвигунів.
EXAMPLES OF THE USE OF LINEAR MOTORS
Rakhimov Andrey Valerievich
Stavropol State Agrarian University
Abstract
The article defines the concept of a linear motor. This electric motor with one magnetic member open system, winding is deployed. Winding generates a magnetic field which interacts with the second element of the magnetic system, configured as a guide member for moving the movable part of the linear motor. A classification of linear motors. The major ones - synchronous, asynchronous, electromagnetic, magneto, magnetostrictive and piezoelectric linear motors. We consider the structure of the linear motor. In the linear motor, there are two parts: the first - a fixed, known as "stator", and secondary - mobile, dubbed the "anchor". Anchor receives energy from the motor stator through the magnetic field. Linear motor is a major part of direct drive. It is designed to convert electrical energy into translational motion. This actuator consists of the controls and change the speed, which greatly simplifies the design of the executive bodies and allows to improve the various processes. Linear motors are divided into asynchronous and synchronous. In asynchronous linear motor reactive band, made in the form of a bar of rectangular cross section without windings, fixed along the overpass, over which electric moves, moves the movable part (inductor) engine. Its magnetic circuit is configured deployed polyphase windings, is powered by an AC power source. Due to the interaction of the magnetic field of the inductor with the field of reactive bands, the forces that cause to move with acceleration relative to the fixed inductor reactive bands. This movement occurs until the moving speed until the inductor of the running magnetic field and reactive bands are equal. The advantage of this design is the placement of an easier to manufacture the reactive strip. The article discusses the relevance of the implementation of linear motors in modern technological processes are disclosed advantages and disadvantages of these electric cars are examples of the use of linear motors.
Лінійним електродвигуном називається електричний двигун з одним розімкненим елементом магнітної системи, обмотка якого розгорнута. Обмотка створює магнітне поле, з яким взаємодіє другий елемент магнітної системи, виконаний як напрямна деталь, що забезпечує переміщення рухомої частини лінійного електродвигуна. Якщо провести класифікацію конструкцій лінійних електродвигунів, то можна виділити кілька типів. Основні з них - синхронні, асинхронні, електромагнітні, магнітоелектричні, магнітострикційні і п'єзоелектричні лінійні двигуни. За принципом дії вони схожі з електродвигунами, що створюють обертальний рух. В основному це синхронні, асинхронні і лінійні електродвигуни постійного струму. У лінійному електродвигуні існує дві частини: первинна - нерухома, що отримала назву «статор», і вторинна - рухлива, що отримала назву «якір». Якір електродвигуна отримує енергію від статора через магнітне поле.
Малюнок 1 - Умовна схема перетворення звичайного електродвигуна в лінійний: 1 -статор (індуктор), 2 ротор (реактивна смуга)
Лінійний електродвигун є основною частиною прямого електроприводу. Він створений для перетворення електричної енергії в енергію поступального руху, т. Е. Без механічної передачі. Такий електропривод складається з коштів управління і зміни швидкості, що значно спрощує конструкцію виконавчих органів і дозволяє вдосконалити різні технологічні процеси. У лінійному електродвигуні є, що живиться електричним струмом, Індуктор, який є первинним елементом, і спеціальна реактивна смуга - вторинний елемент (рисунок 1). Ці елементи відокремлені повітряним зазором. Магнітна система лінійного електродвигуна представлена \u200b\u200bобмоткою певної довжини, яка необхідна для створення рухомого уздовж неї магнітного поля. Це і є нерухомий елемент. Рухомий елемент завдяки взаємодії з магнітним полем, переміщається уздовж обмотки.
Лінійні електродвигуни поділяються на асинхронні і синхронні. В асинхронному лінійному електродвигуні реактивна смуга, виконана у вигляді бруска прямокутного перетину без обмоток, закріплена вздовж шляхопроводу, над яким переміщається електровоз, що переміщає рухому частину (індуктор) двигуна. Його магнітопровід виконаний з розгорнутими багатофазними обмотками, що живляться від джерела змінного струму. Завдяки взаємодії магнітного поля індуктора з полем реактивної смуги, виникають сили, що змушують переміщатися з прискоренням індуктор відносно нерухомої реактивної смуги. Це переміщення відбувається до тих пір, поки швидкості переміщення індуктора і біжить магнітного поля реактивної смуги незрівняються. Перевагою такої конструкції є розміщення простіший у виготовленні реактивної смуги.
Основні переваги лінійного електроприводу - це відсутність механічної передачі і обертових частин, простота в експлуатації, великий технічний ресурс. До основних недоліків можна віднести складність пристрою і високу вартість виготовлення, погані енергетичні показники, пов'язані з наявністю великих повітряних зазорів в магнітному колі і її розімкненням.
Найбільш часто використовуються лінійні двигуни в електричному транспорті. Цьому сприяє ряд переваг. Прямолінійний характер руху рухомої частини, що підходить для руху різних транспортних засобів. Енергія магнітного поля безпосередньо перетворюється в механічну, що дозволяє домогтися високого ККД. Важлива перевага лінійних електродвигунів складається в незалежності сили тяги від сили зчеплення коліс з дорогою. Це неможливо для звичайних систем електричної тяги. Завдяки використанню лінійних електродвигунів прослизання коліс виключається, а швидкості руху транспорту можуть бути досить високими і обмежуються лише комфортабельністю руху, максимально допустимою швидкістю обертання коліс, і динамічної стійкістю транспорту та шляхи.
У приводі механізмів транспортування вантажів різних виробів також застосовуються лінійні асинхронні двигуни. Як правило, це конвеєри, що мають стрічку з металу, яка проходить всередині статоров лінійного двигуна, будучи при цьому вторинним елементом. Використання лінійного електродвигуна дозволяє знизити попередній натяг стрічки і усунути її прослизання, підвищити швидкість і надійність роботи конвеєра.
У сваезабівних молотах, використовуваних при дорожніх роботах або будівництві, також застосовується лінійний електропривод. Статор електродвигуна переміщується вздовж стріли в вертикальному напрямку за допомогою лебідки. Ударна частина молота є одночасно вторинним елементом двигуна. Для її підйому двигун включається таким чином, щоб біжить поле було направлено вгору. Коли ударна частина підніметься до крайнього верхнього положення, двигун відключається, і вона опускається вниз на палю під дією сили тяжіння. Іноді двигун не відключається, а реверсують, це дозволяє збільшити ударну енергію. При заглибленні палі статор двигуна переміщається вниз за допомогою лебідки. Електричний молот простий у виготовленні, не вимагає підвищеної точності виготовлення деталей, нечутливий до зміни температури і може вступати в роботу практично миттєво.
Завдяки появі лінійних електродвигунів, удосконалені багато технологічні процеси, починаючи від створення нового виду гідравлічних насосів і закінчуючи удосконаленням машинного доїння тварин. Розвиток науки і техніки дозволяє спростити виконання технологічних процесів і в кінцевому підсумку знизити витрати виробництва, що необхідно для підвищення конкурентоспроможності вітчизняних виробників товарів.
бібліографічний список
- Грінченка В. А. Обгрунтування базової конструкції лінійного електродвигуна // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
- Грінченка В. А. Обгрунтування конструктивно-режимних параметрів доїльного апарата з електропульсатором на основі лінійного двигуна: дис. ... канд. техн. наук: 05.20.01 - Технології та засоби механізації сільського господарства, 05.20.02 - Електротехнології та електрообладнання в сільському господарстві. - Ставрополь, 2011. - 197 с.
- Нікітенко Г. В., Грінченко В. А. Лінійний двигун зворотно-поступального руху з регулюванням амплітуди коливань якоря // Методи і технічні засоби підвищення ефективності використання електроустаткування в промисловості і сільському господарстві. - Ставрополь: Агрус, 2009. - С. 407-410.
- Нікітенко Г. В., Грінченко В. А. Результати дослідження лінійного двигуна для вакуумного пульсатора доїльного апарату // Методи і технічні засоби підвищення ефективності використання електроустаткування в промисловості і сільському господарстві. - Ставрополь: Агрус, 2010. - С. 268-271.
- Нікітенко Г. В., Грінченко В. А. Статика електромеханічних процесів в лінійному електродвигуні для приводу пульсатора доїльного апарату // Методи і технічні засоби підвищення ефективності використання електроустаткування в промисловості і сільському господарстві. - Ставрополь: Агрус, 2011. - С. 199-202.
- Пат. 2357143 Російська Федерація, МПК F 16 К 31/06. Електромагнітний клапан / Нікітенко Г. В., Грінченко В. А .; заявник і власник патенту Ставроп. держ. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Російська Федерація, МПК H 02 K 33/12. Лінійний двигун / Нікітенко Г. В., Грінченко В. А .; заявник і власник патенту Ставроп. держ. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Російська Федерація, МПК А 01 J 7/00. Регулятор вакууму / Нікітенко Г. В., Грінченко В. А .; заявник і власник патенту Ставроп. держ. аграр. ун-т. - № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
До теперішнього моменту можна виділити кілька типів лінійних безпосередніх двигунів (далі будемо називати їх просто лінійними двигунами): асинхронний, постійного струму, синхронний на постійних магнітах (вентильний), кроковий.
Ще на початку ХХ століття (02.06.1906 №12581) в Англії Зеденом був зареєстрований патент на винахід лінійного асинхронного двигуна. Наведемо витяг з цього патенту.
"Винахід відноситься до пристроїв для приведення в рух залізничних екіпажів, ліфтів, зворотно-поступальних частин машин, верстатів і інших пристосувань за допомогою рухомого (біжить) магнітного поля. У застосуванні до залізницям магніт (індуктор), натхнений трифазним або іншим струмом, встановлюється на екіпажі поблизу від рейки (смуги), який грає роль короткозамкнутого якоря багатофазного двигуна. Смуга може бути виконана зі сталі і латуні або іншого металу, і в ній для економії маси і регулювання струму пророблені отвори (перфорації) різної ширини - для забезпечення пуску екіпажу і т. П. Магніти (індуктори) можуть бути встановлені над або під смугою для збільшення зчеплення або часткової компенсації маси екіпажу. Вони можуть бути розташовані з протилежних сторін смуги, або електромагніт (індуктор) може бути розташований з одного боку смуги, а шихтованний пакет стали - з іншого. Пристрій може бути таким, що сили врівноважуються або НЕ врівноважуються. У разі ліфта, наприклад, індуктори спрямовані назовні для взаємодії з двома напрямними смугами ".
Характерно, що практично всі конструкції сучасних лінійних асинхронних двигунів в тій чи іншій мірі використовують положення цього патенту, виключення становлять лише кілька спеціальних типів двигунів.
Одним з перших лінійних асинхронних електроприводів із значним поступальним переміщенням і великий, хоча і короткочасно реалізованої потужністю слід вважати систем розгону літаків, розроблену в 1945 р фірмою "Вестінгауз" для флоту США. Первинна частина двигуна зміцнювалася на візку, на якій встановлювався розганяється літак. До візку підводилося трифазне харчування з однієї заземленою фазою. Нерухома вторинна частина мала в довжину кілька сотень метрів і являла собою набраний із сталевих пластин муздрамтеатр з короткозамкненою кліткою з мідного сплаву ( великим опором по краях шляху і меншим в середині шляху). Двигун розвивав силу тяги 75 кН при швидкостях від 0 до 100 м / с, тобто мав потужність близько 7500 кВт. Реактивний літак масою 4,5.103 кг розганявся на смузі завдовжки 165 за 4,2 с до швидкості 50 м / с (а \u003d 12 м / с2, F \u003d ma \u003d 55 кН, інші 20 кН витрачалися на подолання опору повітря і для підйому) .
Величезне число розробок проводилося і проводиться до сих пір в плані використання лінійних асинхронних двигунів в якості призводять пристроїв транспортних засобів. Причому, розробки велися як по шляху розгортання двигунів обертального руху в площину, так і абсолютно автономно (це стосується не тільки асинхронних двигунів).
Лінійні асинхронні двигуни мають ряд переваг і недоліків, які обумовлюють їх область застосування. До переваг можна віднести невисоку вартість комплектуючих, відсутність необхідності наявності датчика для руху, досяжність високих значень швидкостей і прискорень. До недоліків: необхідність невеликого повітряного зазору, низький ККД (неможливість роботи через значні втрат у вторинній частини на низьких швидкостях і в режимі підтримки сили). Звідси і область його застосувань - транспортні задачі, що вимагають великих швидкостей і прискорень, плавності ходу, але які не потребують високої точності.
З розвитком технології виготовлення постійних магнітів, а зокрема з появою таких сплавів, як Сомар-кобальт і неодим-залізо-бор, отримали розвиток і електричні машини з постійними магнітами. Вентильні електроприводи з двигунами з порушенням від постійних магнітів є на сьогоднішній день найбільш ефективними і найбільш динамічними. На даний момент можемо спостерігати бурхливий розвиток систем з безпосереднім приводом на основі вентильних двигунів. Це стосується і двигунів обертального руху, і лінійних двигунів. Лінійні вентильні двигуни безпосереднього приводу покликані замінити всілякі передавальні пристрої в системах автоматичної обробки і точного позиціонування.
Зараз можна виділити два основних принципово різних типи лінійних вентильних двигунів: лінійний вентильний двигун з феромагнітним якорем і лінійний вентильний двигун з немагнітним якорем. Причому, не має значення якір або індуктор рухається, хоча кращим в даний час є пересування обмоток (якоря), ніж магнітів (індуктора).
Лінійні двигуни з феромагнітним якорем отримали значний розвиток і зараз компанії виробники таких двигунів можуть запропонує машини з тяговими зусиллями від 200 Н до 20 кН, що перекриває значний діапазон завдань навіть важкого верстатобудування. Область застосування цих двигунів поступово розширюється і включає вже будь-верстатне обладнання, яке потребує швидких і стабільно точних переміщень, наприклад установки для лазерного різання і багатофункціональні верстати, зокрема, для твердого точіння і шліфування. В таких верстатах, що випускаються в світі декількома фірмами, при точінні використовують високу динаміку лінійних двигунів, а при шліфуванні - забезпечуване ними високу точність переміщень. Відсутність зносу і можливість виконання цими двигунами частих швидких і коротких ходів особливо затребувані в шліфувальних верстатах, оскільки кулько-гвинтові передачі нерідко не витримують такого темпу і виходять з ладу.
На рис.1 наведено такий двигун. Індуктор виконаний у вигляді розімкнутої смуги постійних магнітів. Якір виконаний в єдиному корпусі і складається з багатофазної системи обмоток і феромагнітної пластини, що замикає потік індуктора. Якір закріплений на транспортній пластині, яка може здійснювати зворотно-поступальні рухи по лінійним направляють кочення. На рис.1 непомітний датчик переміщення, який встановлений також на виконавчому органі. Через гнучкий кабель-канал до якоря і до датчика підведені кабелі відповідно харчування обмоток і зворотного зв'язку (сигналів датчика лінійного переміщення).
Рис. 1 Лінійний двигун з феромагнітним якорем
Така конструкція лінійного вентильного двигуна стала наслідком прямого розгортання синхронної машини обертального руху з постійними магнітами в площину. Хоча ці двигуни є на сьогоднішній день основними конкурентами кулько-гвинтових передач, проте в зв'язку з присутністю в них деяких особливостей (а саме наявність втрат "в стали" якоря і наявність значного тяжіння виконавчого органу до індуктора), розвитком таких напрямків як лазерна і термічна обробка явили світу принципово нову конструкцію лінійних вентильних двигунів. Саме вимоги скорочення втрат в перетворенні енергії і збільшення номінальних швидкостей і прискорень привели до появи і активної розробки лінійних вентильних двигунів з немагнітним якорем.
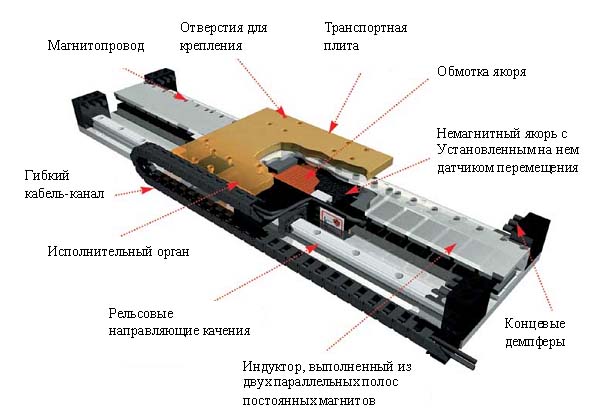
Рис. 2. Лінійний вентильний двигун з немагнітним якорем.
На рис.2 представлений приклад такого двигуна (Trilogy systems, США). На відміну від попереднього двигуна, якір двигуна з немагнітним якорем не містить магнітопровдящіх частин (через це він так і названий) і виконаний у вигляді системи багатофазних обмоток. Індуктор виконаний у вигляді двох сталевих пластин, з встановленими на них постійними магнітами і скріпленими в єдиний блок, який в перерізі нагадує букву U. Тому в англомовних джерелах можемо зустріти іншу назву таких двигунів - U-образні лінійні двигуни.
19 Июля 2011 Сьогодні ми продовжимо розмову про приводах механізмів. Предметом нашого розгляду стануть синхронні лінійні двигуни, останнім часом складові конкуренцію класичним схемами «серводвигун-ШВП» і «серводвигун-рейка». Практично всі виробники серводвигунів пропонують на нашому ринку і лінійні двигуни (перераховані в алфавітному порядку): Fanuc (Японія), Mitsubishi (Японія), Sew-eurodrive (Німеччина), Siemens (Німеччина). Присутній на ринку і виробник з СНД - білоруське СП «Рухсервомотор». Каталоги і матеріали цих фірм використані при написанні статті.
Застосування лінійних двигунів має наступні переваги перед схемами з серводвигунами: точність позиціонування; можливі сверхмалі подачі (мікрони); висока швидкість (понад 3 м / с); високе прискорення (80 м / с 2); відсутність мертвого ходу; низький рівень шуму навіть при максимальній швидкості; можливість реалізації малих робочих ходів; відсутні пружні деформації елементів приводу (зубчастий ремінь, гвинт ШВП); тривалий термін служби і надійність. До недоліків слід віднести: високі вимоги до точності виготовлення елементів машини; наявність системи охолодження; висока вартість.
До складу типовий сервосистеми на основі лінійного двигуна (Рис. 1) входять: лінійний двигун, що складається з первинної і вторинної секцій; блок управління (на малюнку не показаний); робочий стіл; напрямні кочення; датчик зворотного зв'язку; Кабелевкладальні ланцюг; обмежувач ходу; буфер.
Для контролю швидкості, положення системи і комутації двигуна використовується датчик лінійних переміщень. Цей вузол перетворює вимірюваний переміщення в послідовність електричних сигналів, що містять інформацію про величину і напрямку цих переміщень. Перетворювач складається з вимірювальної головки і лінійки, при цьому між ними відсутній механічний контакт. Як правило, це оптикоелектричного датчики, але також можуть використовуватися магнітні та індукційні системи.
Лінійний двигун, як і обертається, складається з двох частин: первинної і вторинної секцій. Первинна секція відповідає статора обертається двигуна. Вона включає в себе шихтованний муздрамтеатр з трифазної обмоткою і температурний датчик. Вторинна секція являє собою ротор, що складається з сталевого каркаса з прикріпленими до нього постійними магнітами. Первинна і вторинна секції укладені в оболонки.
Умовно кажучи, лінійний двигун (Рис.2)
представляє собою обертовий двигун, який розрізаний і «розгорнуто» в плоске стан. Відповідно, принципи роботи залишаються незмінними. Однак, в лінійному двигуні рух здійснює первинна секція (обмотка) при нерухомій вторинної секції (роторі).

Рушійний магнітне поле генерується обмоткою первинної секції. Поля вторинної секції та результуюче магнітне поле первинної секції створюють рух у відповідному напрямку за допомогою створення тягового зусилля. Положення результуючого вектора визначається фазами струмів інвертора, а амплітуда вектора, і, отже, розвивається мотором зусилля, задається амплітудами фазних струмів.
Для нормальної роботи лінійного двигуна необхідно точно витримати повітряний зазор між первинною і вторинною секціями. При збільшенні зазору зменшується здатність навантаження двигуна. У зв'язку з цим підвищуються вимоги до точності виконання монтажних поверхонь. На величину і точність повітряного зазору впливають напрямні прямолінійного руху і робочий стіл.
Як і серводвигун, лінійний двигун управляється блоком управління. Модель блоку управління залежать від типу вибраної лінійного двигуна.
На одній осі можуть бути встановлені дві первинних секції, що працюють паралельно від одного блоку управління. Ці секції повинні бути одного типорозміру з однаковим типом обмотки. При цьому відстань між первинними секціями визначається необхідними позиціями електричних фаз. Допустимі компонування секцій і відстані між ними наводяться в документації на двигун.
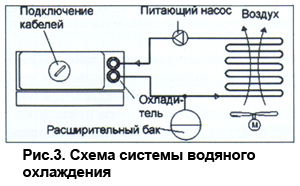
Критичним місцем для лінійних двигунів є температурний режим. Виробники пропонують лінійні двигуни з повітряним і водяним (масляним) охолодженням. Це може бути один і той же двигун, що працює в різних режимах.
Конвекційне охолодження значно спрощує конструкцію машини, проте, при цьому істотно знижується номінальне тягове зусилля (≈ в 2 рази). Максимальне зусилля двигуна залишається колишнім. на рис. 3 представлена \u200b\u200bнайпростіша схема водяного охолодження. Природно, наявність охолодження робить конструкцію всієї машини в цілому складніше.
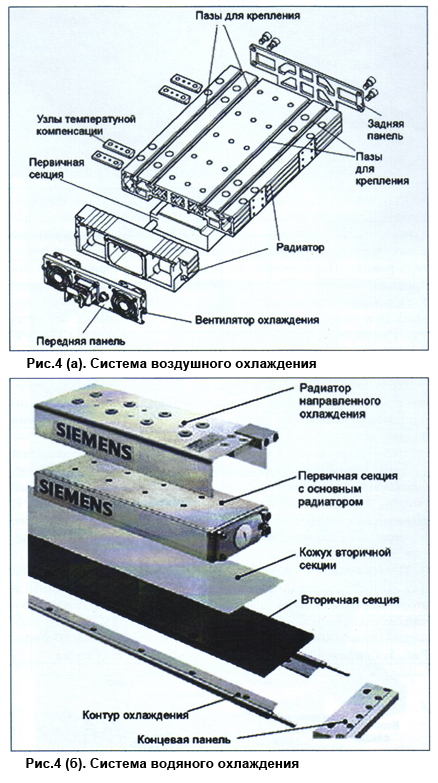
Прагнучи поліпшити охолодження двигуна, виробники вводять в його конструкцію додаткові охолоджуючі елементи. на рис. 4 (а) приведена конструкція первинної секції двигуна фірми Sew-Eurodrive з повітряним охолодженням, в якій застосований вентилятор. на рис. 4 (б) представлений лінійний двигун фірми Siemens з додатковим водяним радіатором спрямованого охолодження первинної і контуром охолодження вторинної секцій.
Для запобігання перегріву лінійний двигун оснащується датчиком температури. Датчик відключає двигун при температурі обмотки ≈ 120ºС.
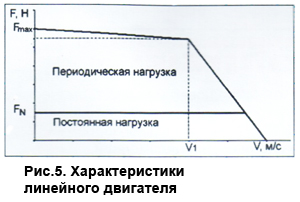
До основних характеристик лінійного двигуна відносять: номінальне тягове зусилля F N, H; максимальне тягове зусилля F max, H; максимальна швидкість V max, м / с; сила магнітного тяжіння первинної секції - довжина L, мм і ширина B, мм. на рис.5 представлена \u200b\u200bтипова залежність тягового зусилля від лінійної швидкості. Номінальне зусилля F N, що задає область роботи з постійним навантаженням, визначається температурним режимом. З максимальним зусиллям двигун може працювати обмежений час і не в усьому діапазоні швидкостей.
В таблиці 1 наведені дані про характеристики лінійних двигунів від різних виробників. Номінальне тягове зусилля наводиться при повітряному і водяному охолодження (розділені знаком «/»). Природно, всі моделі не можуть бути представлені в одній таблиці. Повні каталоги надаються виробниками або їх дилерами.
Таблиця 1. Характеристики лінійних двигунів
|
F max, H |
Mitsubishi(типHALM 12, 14) |
Sew-Eurodrive (тип SL2-Basic) |
Siemens (Тип 1FN3) |
Рухсервомотор (тип LSM-36) |
||||||||||||
|
V max,м / с |
V max,м / с |
LxB,мм |
V max,м / с |
LxB,мм |
V max,м / с |
LxB,мм |
||||||||||
|
|
|
|
| |||||||||||||
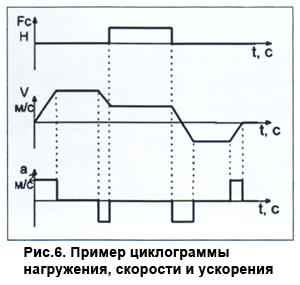 Вихідними даними для розрахунку двигуна є: маса рухомих частин М, кг; коефіцієнт тертя напрямних, μ; робочий хід L, мм; напрямок осі переміщення - горизонтальне, вертикальне, під кутом до горизонталі; робочі зусилля F c, Н; максимальна швидкість переміщення V max, м / с; час прискорення t a, сек; температура довкілля t, ºС. Для правильного вибору лінійного двигуна необхідно мати циклограми навантаження, швидкості і прискорення (Рис.6). Циклограма прискорення є похідною, при цьому прискорення а, м / с 2 визначається за формулою а \u003d V ÷ t a.
Вихідними даними для розрахунку двигуна є: маса рухомих частин М, кг; коефіцієнт тертя напрямних, μ; робочий хід L, мм; напрямок осі переміщення - горизонтальне, вертикальне, під кутом до горизонталі; робочі зусилля F c, Н; максимальна швидкість переміщення V max, м / с; час прискорення t a, сек; температура довкілля t, ºС. Для правильного вибору лінійного двигуна необхідно мати циклограми навантаження, швидкості і прискорення (Рис.6). Циклограма прискорення є похідною, при цьому прискорення а, м / с 2 визначається за формулою а \u003d V ÷ t a.
Вибір лінійного двигуна заснований на визначенні потрібного тягового зусилля. Даний розрахунок передбачає, що вторинна секція лінійного двигуна нерухома. На першому етапі попередньо підбираємо двигун, використовуючи формулу
_ _ _
F max \u003d 1,5 ∙ (F g + F a),
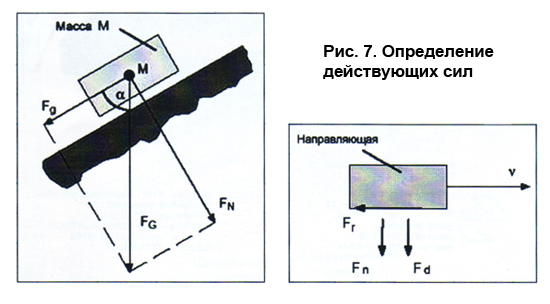
де F g, Н - ефективна складова гравітаційної сили (Рис.7, а); F a - сила енерціі, що виникає при розгоні. Як правило, необхідний двигун з максимальним тяговим зусиллям. За даними виробника вибираємо двигун з необхідним F max і потрібної швидкістю V max.
Потім необхідно визначити силу тертя F r, Н, що виникає в напрямних кочення (Рис.7, б) за формулою
_ _ _
F max \u003d μ ∙ (F n + F d),
де F n - нормальна складова сили тертя; F d - сила магнітного тяжіння первинної секції. Отже, можна записати F r \u003d μ ∙ [(М + m) ∙ g ∙ sin α + F d], де μ, кг - маса первинної секції.
 Слід звернути увагу, що при застосуванні напрямних ковзання сила тертя залежить також від швидкості руху, коефіцієнтів тертя спокою і ковзання, сили притиснення клина направляючої і т.д. Для прикладу на рис.8 (а) приведена циклограмма саме для цього випадку.
Слід звернути увагу, що при застосуванні напрямних ковзання сила тертя залежить також від швидкості руху, коефіцієнтів тертя спокою і ковзання, сили притиснення клина направляючої і т.д. Для прикладу на рис.8 (а) приведена циклограмма саме для цього випадку.
Далі визначаємо силу інерції F a, Н, що виникає при розгоні / гальмуванні двигуна, використовуючи формулу F a \u003d (M + m) ∙ a.
Сума сил, що діють на систему, визначається рівнянням
_ _ _ _ _
F m \u003d F c + F g + F a + F r.
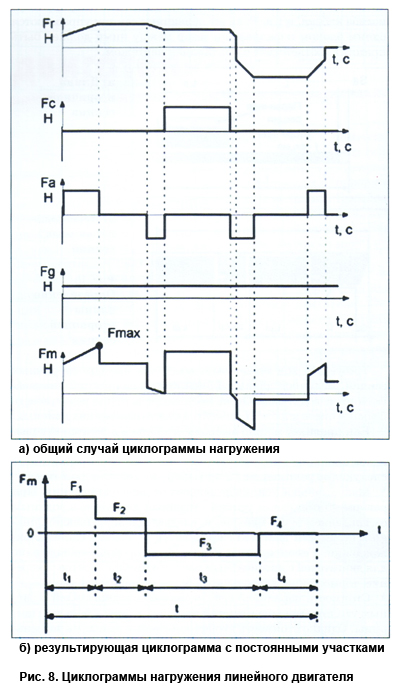
Слід побудувати циклограми всіх діючих на двигун сил і результуючу циклограму (Рис.8). При цьому необхідно точно визначити максимально потрібну силу F max, Н. Попередньо обраний двигун повинен розвивати потрібне максимальне тягове зусилля.
Крім максимальної сили, необхідно визначити номінальне зусилля, з яким двигун може працювати тривалий час. Номінальне тягове зусилля F N, Н, обмежується температурою двигуна і в загальному випадку визначається за формулою
t
F N \u003d √1 / t ∫ F 2 (t) dt.
0
При ступінчастою результуючої циклограмме навантаження (Рис.8, б) (Напрямні кочення) F N \u003d √1 / t ∙ (F 1 2 t 1 + F 2 2 t 2 + F 3 2 t 3 + ... + F n 2 t n).
Після вибору первинної секції необхідно вибрати вторинну секцію. Довжина вторинної секції (рис.9, а) L s, мм визначається за формулою L s ≥ L + L p + (2 ∙ S E), де L, мм - робочий хід; L p, мм - активна довжина первинної секції; S E, мм - запас ходу на перемикання (≈20 мм).
На одній вторинній секції можна встановлювати кілька первинних (Рис.9, б). При цьому довжина вторинної секції відповідно повинна бути збільшена на довжину первинної секції і на зазор між секціями. Якщо первинні секції управляються від різних сервопідсилювач з окремими вимірювальними системами (типу провідний / ведений привід), зазор між ними визначається вимогами механічних частин системи - довжина присоединительного штекера, радіус вигину кабелю, і т.д. Якщо ж первинні секції управляються одним блоком паралельно, зазор між ними повинен бути прийнятий у відповідність з монтажним кресленням.
Необхідний хід може бути забезпечений набором вторинних секцій різної довжини. Довжини вторинних секцій вказуються виробником. Дуже часто вигідніше використовувати велику кількість коротких сегментів замість кількох довгих. 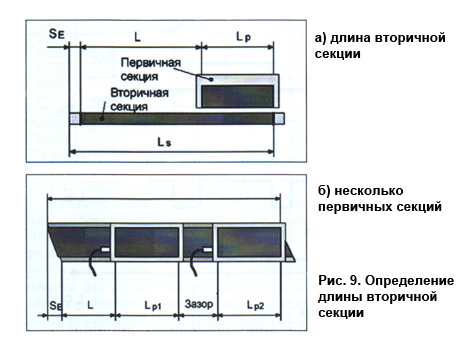 Як правило, можна вибрати кілька двигунів з різними розмірами, що мають приблизно рівні максимальне і номінальне тягові зусилля. В цьому випадку можна дати наступні рекомендації по вибору лінійного двигуна.
Як правило, можна вибрати кілька двигунів з різними розмірами, що мають приблизно рівні максимальне і номінальне тягові зусилля. В цьому випадку можна дати наступні рекомендації по вибору лінійного двигуна.
Максимальне зусилля не залежить від виду охолодження. При рівному номінальному зусиллі лінійний двигун з водяним охолодженням буде менше, і, отже, дешевше. Однак до вартості двигуна додасться вартість системи охолодження. Рекомендується використовувати водяне охолодження для двигунів з інтенсивним робочим циклом (часте прискорення, гальмування, тривала робота з великим зусиллям).
Вартість первинної секції лінійних двигунів з рівним зусиллям менше у секцій меншої довжини і більшої ширини. Однак вартість вторинної секції менше при меншій ширині. Тому при малому робочому ході (менше 1 м) рекомендується вибирати двигун з меншою довжиною і більшою шириною первинної секції. При переміщеннях понад 1 м - первинну секцію більшої довжини і меншою ширини.
Максимальна швидкість лінійного двигуна залежить від значення струму при заданій напрузі харчування. Слід вибирати виконання двигуна з найменшою швидкістю, найбільш близькою до потрібної.
Сервоприводи відносяться до тієї галузі машинобудування, яку називають «мехатроніка». Цей термін об'єднує поняття «механізм» і «електроніка». Досягнення електроніки дозволяють назвати практично будь-який сучасний механізм мехатронним. Разом з тим, часто доводиться чути, що «це дорого», «це не для наших умов» і т.д. А може, варто ще раз згадати слова академіка В. Н. Челомея: «Щоб система була стійкіше, її треба часто трясти».
М. Гранкін, інженер-конструктор
Журнал «Світ техніки і технологій»