Metodat për ngacmim të makinave DC dhe klasifikimin e tyre. Llojet e ngacmimit dhe qarkut të përfshirjes së motorrit DC
Rrjedhja e tanishme në dredha-dredha e ngacmimit të poleve kryesore krijon një fluks magnetik. Makina elektrike rrymë e vazhdueshme Duhet të dallohet nga metoda e ngacmimit dhe skema e përfshirjes së dredha-dredha të ngacmimit.
Gjeneruesit DC mund të kryhen me ngacmim të pavarur, paralel, sekuencial dhe të përzier.Duhet të theksohet se tani përdorimi i gjeneratorëve të DC është shumë i kufizuar si burimet e energjisë.
Harrow dredha-dredha gjeneratori i DC me ngacmim të pavarur Ai merr fuqi nga një rrjet burimor i pavarur - DC, një patogjen, konvertim, etj. (Fig. 1, A). Këta gjeneratorë aplikohen në sisteme të fuqishme kur tensioni i ngacmimit duhet të zgjidhet ndryshe nga tensioni i gjeneratorit, në sistemet që ushqehen me gjeneratorë dhe burime të tjera.
Vlera e rrymës së ngacmimit të gjeneratorëve të fuqishëm është 1.0-1.5% e gjeneratorit aktual dhe deri në dhjetëra për qind për makinat me një fuqi të rreth dhjetëra watts.
Fik. 1. Skemat e gjeneratorëve të DC: A - me ngacmim të pavarur; b - me ngacmim paralel; B - me ngacmim të qëndrueshëm; G - me ngacmim të përzier n - konsumatorët
W. g. enerator me ngacmim paralel Dredha-dredha e ngacmimit aktivizohet në tensionin e vetë gjeneratorit (shih Fig. 1, B). Një atchor aktual unë është e barabartë me shumën e rrymave të ngarkesës i n dhe ngacmimi i tanishëm i në: i \u003d i n + i në
Gjeneruesit zakonisht ekzekutohen për fuqinë e mesme.
Harrow dredha-dredha gjenerator i ngacmimit vijues Përfshirë në mënyrë sekuenciale në zinxhirin e ankorimit dhe rrjedh rreth një atchor aktual (Fig. 1, B). Procesi i vetë-ngacmim i gjeneratorit vazhdon shumë dhunshëm. Gjeneratorë të tillë praktikisht nuk përdoren. Në fillim të zhvillimit të energjisë është përdorur sistemi i transmetimit të energjisë me gjeneratorë të përfshirë në mënyrë të suksesshme dhe motorët e ngacmimit vijues.
Gjeneratori i përzier i ngacmimit ka dy ndërprerje të ngacmimeve - OVP paralele dhe abs konsistent Zakonisht me përfshirjen konsonante (Fig. 1, D). Një dredhi paralele mund të kthehet në një serial ("shunt të shkurtër") ose pas saj ("shunt gjatë"). MDS WINDING SERIAL është zakonisht i vogël dhe është projektuar vetëm për të kompensuar rënien e tensionit në spirancë gjatë ngarkesës. Gjeneratorë të tillë tani janë zbatuar gjithashtu praktikisht.
Qarqet e ngacmimit motorik DC janë të ngjashme me gjeneruesit. Zakonisht fuqia e lartë me ngacmim të pavarur. Në motorët paralel të ngacmimit, dredha-dredha e ngacmimit mundësohet nga burimi i njëjtë i energjisë si motori. Dredha-dredha e ngacmimit është kthyer drejtpërdrejt në tensionin e burimit të energjisë në mënyrë që efekti i rënies së tensionit në rezistencën fillestare nuk ka ndikuar (Fig. 2).
Fik. 2. Qarku Motor DC me ngacmim paralel
Rrjeti aktual IC është e përbërë nga ankorimi i tanishëm i dhe ngacmimi i tanishëm I B.
Motori i ngacmimit vijues Ashtu si një skemë në Fig. 1, c. Për shkak të dredha-dredha serik, çift rrotullues kur ngarkesa rritet më shumë se në motorët paralel të ngacmimit dhe shpejtësia e rrotullimit zvogëlohet. Kjo pronë e motorëve përcakton aplikimin e tyre të gjerë në disqet e tërheqjes elektrike: në lokomotivat elektrike kryesore, transportin urban, etj. Rënia e tensionit në dredha-dredha në një rrymë të vlerësuar është njësitë e përqindjes së tensionit të vlerësuar.
Motorë ngacmim i përzier Për shkak të pranisë së një dreqësie sekuenciale deri në një farë mase, vetitë e motorëve të ngacmimit vijues janë. Aktualisht, ata praktikisht nuk zbatohen. Motorët e ngacmimit paralel Ndonjëherë ato kryhen me një dredhje stabilizuese (sekuenciale), të përfshira në përputhje me dredha-dredha paralele të ngacmimit, për të siguruar punë më të relaksuar kur majat e ngarkesës. MDS një dredhi e tillë stabilizuese është njësive të vogla për qind të MD-ve kryesore.
Vetitë e motorëve elektrikë DC përcaktohen kryesisht nga mënyra se si përfshihet fryrja e ngacmimit. Në varësi të kësaj, motorët elektrikë dallohen:
me ngacmim të pavarur: Dredha e ngacmimit është mundësuar nga një burim i jashtëm DC (agjent shkaktar ose ndreqës);
me ngacmim paralel: Dredha-dredha e ngacmimit është e lidhur paralelisht me dredha-dredha e ankorimit;
me ngacmim të qëndrueshëm: Dredha-dredha e ngacmimit mundësohet në mënyrë sekuenciale me një dredha-dredha të ankorimit;
me ngacmim të përzier: Ka dy ndërprerje eksitim, një është e lidhur paralelisht me dredha-dredha spirancë, dhe tjetra është në vijim me të.
Të gjithë këta motorë elektrike kanë të njëjtën pajisje dhe ndryshojnë vetëm në ecurinë e dredha-dredha të ngacmimit. Rrëshqitjet e ngacmimit të motorëve elektrikë të specifikuar kryhen në të njëjtën mënyrë si gjeneruesit përkatës.
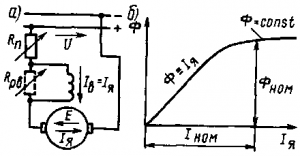
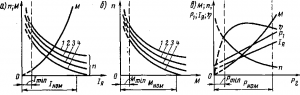
Një motor elektrik me ngacmim të pavarur. Në këtë motor elektrik (Fig 125, a), dredha-dredha e ankorimit është e lidhur me burimin kryesor të DC (rrjeti DC, gjenerator ose ndreqës) me një tension U, dhe dredha-dredha e ngacmimit është për burimin ndihmës në tension U b. Qarku dredha-dredha e ngacmimit përfshin një RV RV RV, dhe një qark i ankorimit të ankorimit është një mbajtës i fillimit R P. P. Rregullimi i Restous është përdorur për të kontrolluar shpejtësinë e spirancës së motorit dhe fillimin për të kufizuar rrymën në fund të ankorimit kur fillon. Karakteristika karakteristike e motorit elektrik është se rryma e saj e ngacmimit nuk është e varur nga unë unë jam në dredha-dredha e spirancës (ngarkesa e tanishme). Prandaj, duke neglizhuar reagimin e ankorimit duke neglizhuar reagimin, është e mundur të supozohet përafërsisht se lumenjtë FF nuk varet nga ngarkesa. Në këtë rast, sipas formulave (63 ') dhe (65), ne marrim se varësia e momentit elektromagnetik m dhe frekuenca e rrotullimit P nga aktuale unë do të jetë lineare (Fig 126, a). Rrjedhimisht, do të jetë linear karakteristikë mekanike Motori - varësia p (m) (Figura 126, b).
Në mungesë të zinxhirit të spirancës së reostat me rezistencën r p, shpejtësia dhe karakteristikat mekanike do të jenë të ngurtë, domethënë, me një kënd të vogël të prirjes në boshtin horizontal, që nga rënia e tensionit unë? R i në mbështjelljet e makinës të përfshira në zinxhirin e ankorimit, në një ngarkesë të vlerësuar prej vetëm 3-5% të u hom. Këto karakteristika (direkt 1 në Fig. 126, A dhe B) janë quajtur natyror. Me përfshirjen e ankorimit të ankorimit me rezistencën r p, këndi i prirjes së këtyre karakteristikave rritet, si rezultat i së cilës familja e karakteristikave të fuqishme 2, 3 dhe 4 që korrespondon me të ndryshme
vlerat R P1, R P2 dhe R P3. Se më shumë rezistencë R n, këndi më i madh i prirjes ka një karakteristikë të fuqishme, dmth., Që është më e butë.
Statusi i rregullueshëm RV ju lejon të ndryshoni rrymën e ngacmimit të motorit IB dhe fluksit magnetik të saj F. si më poshtë nga formula (65), shpejtësia e rrotullimit n. Në qarkun e dredha-dredha të ngacmimit, nuk janë instaluar asnjë çelës dhe siguresa, sepse kur Ajo thyen këtë qark të ashpër zvogëlon fluksin magnetik të motorit elektrik (mbetet vetëm një rrjedhë nga magnetizmi i mbetur) dhe ndodh regjimi i emergjencës. Nëse motor elektrik punon në boshe ose një ngarkesë të vogël në bosht, atëherë shpejtësia e rrotullimit, si më poshtë nga formula (65), rritet ndjeshëm (motori është rrotulluar). Në të njëjtën kohë, rryma në dredha e spirancës [shih Formula (66)] dhe mund të ndodhë një zjarr rrethore. Për të shmangur këtë mbrojtje, fikni motorin elektrik nga furnizimi me energji elektrike. Një rritje e mprehtë në shpejtësinë e rrotullimit kur ndërprerjet e qarkullimit të ngacmimit është për shkak të faktit se në këtë rast fluksi magnetik f (në vlerën e rrjedhës së f, nga magnetizmi i mbetur) dhe e është zvogëluar ndjeshëm. d. s. E dhe rritjen e tanishme I. Dhe që nga tensioni i aplikuar u mbetet i pandryshuar, frekuenca e rotacionit P do të rritet deri në e. d. s. E nuk arrin vlerën e përafërsisht të barabartë me u (e cila është e nevojshme për një gjendje ekuilibri zinxhir elektrik Anchor, në të cilën e \u003d u - unë mua? R i).
Me një ngarkesë në bosht pranë nominalit, motor elektrik në rast të një këputjeje të zinxhirit të ngacmimit do të ndalet, pasi momenti elektromagnetik që mund të zhvillojë motorin me një rënie të ndjeshme në fluksin magnetik, zvogëlon [cm. Formula (63 ")] dhe do të bëhet më pak çift rrotullues në bosht. Në këtë rast, unë [që në formulë (64) e. s. E do të jetë zero], dhe makina duhet të jetë me aftësi të kufizuara nga burimi i energjisë.
Duhet të theksohet se shpejtësia e rrotullimit n 0 korrespondon me boshe të përsosur kur motori nuk konsumon nga rrjeti energji elektrike Dhe momenti elektromagnetik i tij është zero. Në kushtet reale në modalitetin boshe, motori konsumon nga rrjeti aktual i 0, i cili është i nevojshëm për të kompensuar humbjet e brendshme të energjisë (shih § 25) dhe zhvillon një moment të caktuar M 0 të nevojshme për të kapërcyer forcat e fërkimit në makinë. Prandaj, në të vërtetë, frekuenca e rrotullimit në boshe është më pak se jo.
Varësia e frekuencës së rrotullimit n dhe momenti elektromagnetik m në fuqinë e p 2 (Figura 126, c) në bosht motorik, si më poshtë nga marrëdhëniet e konsideruara, është lineare. Varësia e rrymës së dredha-dredha e spirancës I dhe fuqia P 1 nga p 2 është pothuajse lineare. Aktualisht I dhe Power P 1 në P 2 \u003d 0 janë një aktuale Idling i 0 dhe Power P 0 konsumuar në kurs boshe. Curve për të. P. D. ka një karakter të përbashkët për të gjitha makinat elektrike (shih § 37).
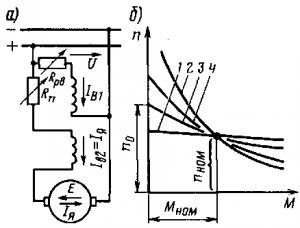
Motor elektrik me ngacmim paralel. Në këtë motor elektrik (shih Fig. 125, b), mbështjelljet e ngacmimeve dhe ankorat mundësohen nga i njëjti burim i energjisë elektrike me një tension U. RV RV RV-ja është e ndezur në qarkun e dredha-dredha të ngacmimit dhe një qarkullim të ankorimit është një lëshues r n. Në motor elektrik të konsideruar, në thelb ka zinxhirë të veçantë të furnizimit me energji elektrike të ankorave dhe mbështjelljeve të ngacmimeve, si rezultat i të cilave rryma e ngacmimit nuk varet nga rryma aktuale e terrenit. Prandaj, motor elektrik me ngacmim paralel do të ketë të njëjtat karakteristika si një motor i pavarur i ngacmimit. Megjithatë, motori me ngacmim paralel punon normalisht vetëm kur mundësohet nga një burim DC me tension të vazhdueshëm.
Kur mundëson motorin elektrik nga një burim i tensionit të ndryshueshëm (gjenerator ose ndreqës i kontrolluar), reduktimi i tensionit të furnizimit u e quan rënien e duhur të ngacmimit IB dhe fluks magnetik f, i cili çon në një rritje të rrymës aktuale të ankorimit [cm. Formula (66)]. Kjo kufizon aftësinë për të kontrolluar shpejtësinë e rrotullimit të spirancës duke ndryshuar tensionin e furnizimit U. Prandaj, motorët elektrikë të destinuara për të ushqyerit nga një gjenerator ose ndreqës i kontrolluar duhet të kenë eksitim të pavarur.
Motor elektrik me ngacmim të qëndrueshëm. Për të kufizuar rrymën kur fillon qarkun e dredha-dredha të ankorimit, të aktivizohet rouncher r p (fig 127, a), dhe për të rregulluar shpejtësinë e rrotullimit
paralelisht, dredha-dredha e ngacmimit mund të mundësohet rregullimi i RV RV. Një tipar karakteristik i këtij motor elektrik është se rryma e saj e ngacmimit është e barabartë ose proporcionale (kur RV RV RV) është e ndezur) një spirancë rrymë e rrymës i, kështu që rrjedha magnetike f varet nga ngarkesa e motorit (Fig. 127, b).
Me rrymën e spirancës, më pak (0.8-0.9) të rrymës së vlerësuar, unë nom, sistemi magnetik i makinës nuk është i ngopur dhe mund të supozohet se rrjedha magnetike ndryshon drejtpërsëdrejti me të . Prandaj, shpejtësia e shpejtësisë së motorit elektrik do të jetë e butë - me rritjen e tanishme i, frekuenca e rrotullimit n do të ulet ndjeshëm (Fig. 128, a). Reduktimi i frekuencës së rrotullimit n, si më poshtë nga formula (65), është për shkak të rritjes së rënies së tensionit i? R i rezistencë e brendshme? R Unë jam zinxhirët e ankorimit, si dhe për shkak të rritjes së fluksit magnetik F.
Momenti elektromagnetik M me rrymën në rritje unë do të rritet në mënyrë dramatike, pasi në këtë rast rrjedha magnetike F është në rritje, i.E. Momenti m do të jetë proporcional me të tanishme I. Prandaj, në një të tanishëm i, më pak (0.8-0.9) i, karakteristika me shpejtësi të lartë ka formën e hiperboleve, dhe momenti - parabola.
Në rrymat i\u003e kam nominuar m dhe n nga unë, unë jam linear, që në këtë mënyrë qarku magnetik do të jetë i ngopur dhe rryma magnetike f kur ndryshon aktuale unë nuk do të ndryshoj.
Karakteristika mekanike, dmth., Varësia e p nga m (Figura 128.6) mund të ndërtohet në bazë të vargjeve n dhe m nga I. Përveç karakteristikave natyrore 1, është e mundur nga përfshirja në ankorimin e ankorimit të zinxhirit të zinxhirit me rezistencën e r p për të marrë një familje të karakteristikave të reostat 2, 3 dhe 4. Këto karakteristika korrespondojnë me vlerat e ndryshme të R P1, R p2 dhe r p3; Në të njëjtën kohë, më e madhe r n, aq më e ulët është karakteristika. Karakteristika mekanike e motorit në shqyrtim është e butë dhe ka një karakter hiperbolik. Në ngarkesa të ulëta, rryma magnetike F është e reduktuar fuqimisht, frekuenca e rrotullimit n rrit ndjeshëm dhe mund të tejkalojë vlerën maksimale të lejuar (motori është rrotulluar). Prandaj, motorët e tillë nuk mund të përdoren për të përzënë mekanizma që veprojnë në mënyrë të papunë dhe me ngarkesë të vogël (makina të ndryshme, shiritat, etj.). Zakonisht ngarkesa minimale e lejueshme për motorët e mëdhenj dhe të mesëm është (0.2-0.25) unë nom. Për të parandaluar aftësinë për të punuar pa një ngarkesë, është e lidhur me mekanizmin e makinës të ngurtë (transmetimi i dhëmbëzuar ose tufë e shurdhër); Përdorimi i transmetimit ose tufës së fërkimit të rripit është i papranueshëm.
Pavarësisht nga disavantazhi i specifikuar, motorët me ngacmim vijues janë përdorur gjerësisht, sidomos kur ka një ndryshim në momentin e ngarkesës në kufijtë e gjerë dhe kushtet e forta të fillimit: në të gjitha disqet e tërheqjes (lokomotivat elektrike, lokomotivat e naftës, trenat elektrikë, elektrocarë, ngarkuesit e mallrave elektrike , etj.), si dhe në disqet e mekanizmave të heqjes (vinça, ashensorë, etj.). Ajo shpjegohet me faktin se me një karakteristikë të butë, një rritje në momentin e ngarkesës çon në rrymën më pak të rrymës dhe të konsumuar nga motorë me ngacmim të pavarur dhe paralel; Prandaj, motorët me ngacmim të njëpasnjëshëm janë më të mirë tolerantë. Përveç kësaj, këta motorë kanë një pikë fillestare të madhe sesa motorët me ngacmim paralel dhe të pavarur, pasi me një rritje të ankorimit aktual në një fillim, fluksi magnetik rritet në përputhje me rrethanat.
Nëse marrim, për shembull, atë afat të shkurtër duke filluar aktual Mund të jetë 2 herë më e lartë se rryma e operimit të vlerësuar të makinës, dhe neglizhoni efektin e ngopjes, reagimin e ankorimit dhe një rënie të tensionit në qarkun e dredha-dredha, pastaj në motor me një ngacmim vijues të pikës së fillimit do të jetë 4 herë më nominale (2 herë fluksi aktual dhe magnetik rritet 2 herë), dhe në motorët me ngacmim të pavarur dhe paralel - vetëm 2 herë më shumë. Në fakt, për shkak të ngopjes së zinxhirit magnetik, fluksi magnetik nuk rritet në proporcion me pikën e tanishme, por ende të fillimit të motorit me një ngacmim vijues, me gjëra të tjera që janë të barabarta, do të jetë dukshëm më e madhe se fillimi çift \u200b\u200brrotullues me ngacmim të pavarur ose paralel.
Varet e P dhe M në fuqinë P2 në bosht të motorit elektrik (Fig. 128, B), si më poshtë nga pozitat e mësipërme, janë jolineare; Varësia p 1, unë dhe? Nga p 2 kanë të njëjtën formë si motorët me ngacmim paralel.
Motor i përzier ngacmim. Në këtë motor elektrik (Fig 129, a), rrjedha magnetike F është krijuar si rezultat i veprimit të përbashkët të dy ndërprerjeve të ngacmimeve - paralele (ose të pavarur) dhe sekuenciale, sipas të cilave rrymat e ngacmimit i b1 dhe i b2 \u003d Unë po kaloj. prandaj
F \u003d f nga krevat + f çifte
F me një rrjedhë magnetike të dredha-dredha serik, në varësi të tanishme i;
F çifte - rrjedha magnetike e një dreqësi paralele, e cila nuk varet nga ngarkesa (e përcaktuar nga ngacmimi aktual i b1).
Karakteristikat mekanike të motorizimit të përzier (Figura 129, B) janë të vendosura në mes të karakteristikave të motorëve me paralel (të drejtë 1) dhe ngacmim sekuencial (kurbë 2). Në varësi të raportit të forcave që vizitojnë magnetomport të mbështjelljeve paralele dhe serial në modalitetin e vlerësuar, karakteristikat e motorit me një ngacmim të përzier për të karakterizuar 1 mund të jenë më afër (kurbë 3 në një m. S. e dredhimit serial) ose të karakterizojë 2
(Curve 4 në një m të vogël. S. në dredha-dredha paralele). Avantazhi i motorit me një ngacmim të përzier është se ajo, që ka një karakteristikë të butë mekanike, mund të veprojë në boshe, kur f postë \u003d 0. në këtë mënyrë, frekuenca e rrotullimit të spirancës së saj përcaktohet nga fluksi magnetik i feve f dhe ka një vlerë të kufizuar (motori nuk shkon në rreze).
DC Motors në varësi të metodave të ngacmimit të tyre, siç është theksuar tashmë, janë të ndara në motorë me të pavarur, paralel (Shuntov), në përputhje (Serial) dhe ngacmim të përzier (kompleks).
Motorë zgjimi i pavarur kërkojnë dy burime të energjisë (Figura 11.9, a). Njëri prej tyre është i nevojshëm për të fuqizuar dredha-dredha e ankorimit (konkluzionet I1 dhe I2.), dhe tjetri - për të krijuar një rrymë në dredha-dredha e ngacmimit (përfundimet dredha-dredha Sh1 dhe SH2.). Rezistencë shtesë Rd Qarku i ankorimit të ankorimit është i nevojshëm për të zvogëluar rrymën e fillimit të motorit në kohën e përfshirjes së tij.
Me ngacmim të pavarur, më së shumti motorët elektrikë të fuqishëm kryhen me qëllim të rregullimit më të përshtatshëm dhe ekonomik të rrymës së ngacmimit. Seksioni kryq i telit dredha-dredha është përcaktuar në varësi të tensionit të furnizimit me energji elektrike. Veçoria e këtyre makinave është pavarësia e rrymës së ngacmimit, dhe në përputhje me rrethanat fluksin kryesor magnetik, nga ngarkesa në bosht motorik.
Motorë të pavarur të ngacmimeve në karakteristikat e tyre praktikisht përkojnë me motorët paralel të ngacmimit.
Motorët e ngacmimit paralel të përfshira në përputhje me skemën e treguar në Fig.11.9, b. Klip I1 dhe I2.i përkasin dredha-dredha të spirancës, dhe pirgjeve Sh1 dhe SH2. - për të ngacmuar dredha-dredha (në dredha-dredha shunt). Rezistencë e ndryshueshme Rd dhe Rvi projektuar përkatësisht për të ndryshuar rrymën në dredha-dredha spirancë dhe në dredha-dredha e ngacmimit. Dredha e ngacmimit të këtij motori kryhet nga një numër i madh i kthesave të telit të bakrit të një seksioni relativisht të vogël dhe ka një rezistencë të konsiderueshme. Kjo ju lejon të lidheni atë me tensionin e plotë të rrjetit të specifikuar në të dhënat e pasaportës.
Tipari i motorëve të këtij lloji është se kur ato janë të ndaluara, është e ndaluar të shkëputet ngacmimi i ngacmimit nga një zinxhir spirancë. Përndryshe, kur hapet një ngacmim i një ngacmimi në të do të shfaqet një vlerë e pavlefshme EMF, e cila mund të çojë në dështimin e motorit dhe në saktësinë e personelit të shërbimit. Për të njëjtën arsye, dredha-dredha e ngacmimit nuk mund të jetë e paqartë dhe kur motori është i fikur, kur rotacioni i saj nuk është ndalur.
Me një rritje të shpejtësisë së shtimit (opsional), rezistenca e RD në zinxhirin e spirancës duhet të reduktohet dhe kur të arrihet shpejtësia e qëndrueshme, është plotësisht e prodhuar.
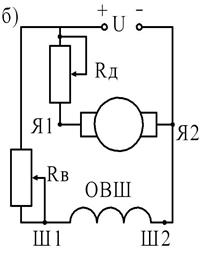
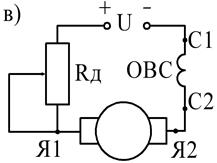
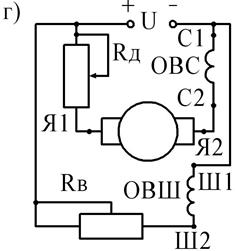
Fig.11.9. Llojet e ngacmimit të makinës DC
një ngacmim i pavarur, b - eksitim paralel,
v - ngacmim vijues, ngacmim m - i përzier.
OVs - dredha e ngacmimit të shunt, ovs - dredha e ngacmimit të serincës, "Aries është një dredha-dredha e një ngacmim të pavarur, rezistencë rd-spirancë në një qark dredha-dredha të spirancës, rezistencë shtesë të RV në qarkullimin e ngacmimit.
Mungesa e rezistencës shtesë në dredha-dredha e spirancës në kohën e fillimit të motorit mund të çojë në shfaqjen e një fillestari të madh të fillimit vlerësuarat aktuale Anchors B. 10 ... 40 herë .
Një pronë e rëndësishme e motorrit paralel është shpejtësia pothuajse e vazhdueshme e rrotullimit kur ngarkesa ndryshohet në boshtin e ankorimit. Pra, kur ndryshon ngarkesën nga idling në vlerën nominale, shpejtësia e rrotullimit zvogëlohet vetëm (2.. 8)% .
Tipari i dytë i këtyre motorëve është rregullimi me kosto efektive të shpejtësisë së rrotullimit, në të cilin raporti i shpejtësisë më të madhe mund të jetë 2:1 , dhe me një ekzekutim të posaçëm të motorit - 6:1 . Frekuenca e rotacionit minimal është e kufizuar nga ngopja e qarkut magnetik, i cili nuk lejon të rrisë fluksin magnetik të makinës dhe kufiri i sipërm i shpejtësisë së rrotullimit përcaktohet nga makineria - me një dobësim të ndjeshëm të magnetikut Fluksi, motori mund të shkojë "Voznos".
Motorët e ngacmimit vijues (Seri) janë të përfshira sipas skemës, (Figura 11.9, b). konkluzione C1. dhe C2. korrespondon me një kullim të një serie (sekuenciale). Është kryer nga një numër relativisht i vogël i kthesave në tela kryesore të bakrit të një seksioni të madh kryq. Dredha-dredha e ngacmimit është e lidhur vazhdimisht me një dredha-dredha spirancë.. Rezistencë shtesë Rd Në zinxhirët dredha-dredha, ankorat dhe eksitim ju lejon të zvogëloni rrymën e fillimit dhe të rregulloni shpejtësinë e motorit. Në momentin e kthimit në motor, ajo duhet të ketë një madhësi në të cilën do të jetë rryma e fillimit (1.5 ... 2.5) në. Pas arritjes së motorit të shpejtësisë së qëndrueshme të rrotullimit, rezistencë shtesë Rd Shfaq, domethënë, është vendosur në zero.
Këta motorë po zhvillojnë momente të mëdha fillimi kur fillojnë dhe duhet të nisë të paktën 25% të vlerës nominale të saj. Përfshirja e motorit në një fuqi më të ulët në boshtin e saj dhe sidomos në mënyrë të papunë nuk lejohet. Përndryshe, motori mund të zhvillojë reviste të papranueshme të mëdha, të cilat do ta shkaktojnë atë jashtë rendit. Motorët e këtij lloji janë përdorur gjerësisht në mekanizmat e transportit dhe heqjes në të cilat ju duhet të ndryshoni shpejtësinë e rrotullimit mbi një gamë të gjerë.
Motorë të përziera të ngacmimeve (Kompleksi), zënë një pozitë të ndërmjetme midis motorëve me ngacmim paralel dhe sekuencial (Fig. 11.9, D). Pjesëmarrja e madhe e tyre për këtë ose atë specie varet nga raporti i pjesëve të fluksit kryesor të ngacmimit të krijuar nga mbështjelljet paralele ose të qëndrueshme të ngacmimit. Për momentin motori është i ndezur për të zvogëluar rrymën e fillimit në qarkun e dredha-dredha të ankorimit, është përfshirë rezistenca shtesë. Rd. Ky motor ka karakteristika të mira të tërheqjes dhe mund të veprojë në mënyrë boshe.
Direkt (jo i prekur), duke përfshirë motorët DC të të gjitha llojeve të ngacmimit lejohet jo më shumë se një kilovat.
Designation DC Machine
Aktualisht, shpërndarja më e gjerë e makinave DC të serisë 2p. Dhe seri më të re 4p. Përveç këtyre serive, motorët janë prodhuar për vinç, ekskavator, metalurgjike dhe seri të tjera seri D. Motorët dhe seri të specializuara janë prodhuar.
Motorët seri 2p. dhe 4pjanë të ndara përgjatë aksit të rrotullimit, siç është e zakonshme për motorët asinkron alternuar aktuale Seri 4a.. Seri makine 2p. Ka 11 dimensione që ndryshojnë në kulmin e rrotullimit të boshtit nga 90 në 315 mm. Gama e kapacitetit të makinave të kësaj serie është nga 0.13 deri në 200 kW për motorët elektrikë dhe nga 0.37 në 180 kW për gjeneratorët. Seria 2P dhe 4P motorët llogariten në tension 110, 220, 340 dhe 440 V. frekuenca nominale Rrotullimi është 750, 1000, 1500,2200 dhe 3000 rpm.
Secila nga 11 dimensionet e serive të makinave 2p. ka zogj me dy gjatësi (M dhe l).
Makinat elektrike seri 4p Kanë teknikat më të mira specifike - treguesit ekonomikë në krahasim me serinë 2p.. Intensiteti i punës i serisë së prodhimit 4p krahasuar me 2p. Reduktuar në 2.5 ... 3 herë. Në të njëjtën kohë, konsumi i bakrit është zvogëluar me 25 ... 30%. Për një numër karakteristikash konstruktive, duke përfshirë një metodë ftohëse, për të mbrojtur kundër ndikimeve atmosferike, për përdorimin e pjesëve individuale dhe komponentëve të makinës të serisë 4p Unifikuar S. motorë asinkron Seri 4a.dhe Ai. .
Përcaktimi i makinës DC (të dy gjeneratorët dhe motorët) duket të jetë si më poshtë:
PX1X2XX4,
ku 2p. - Seria e makinave DC;
Xi - Ekzekutimi i llojit të mbrojtjes: H - i mbrojtur me vetë-ventilim, f - i mbrojtur me ventilim të pavarur, b - Mbyllur me ftohje natyrore, o - mbyllur me defekt nga një tifoz i huaj;
X2 - lartësia e boshtit të rrotullimit (numri me dy shifra ose tre shifror) në mm;
Xs.- Gjatësia e kushtëzuar e statorit: m është e para, l është e dyta, g - me një takë;
Si shembull, mund të jepet përcaktimi i motorit. 2pn112mgu - DC motor seri 2p.Ekzekutimi i sigurt me vetë-facion N.,112 Lartësia e boshtit të rrotullimit në mm, madhësia e parë e statorit M., e pajisur me teogerator G., Të përdorura për klimë të moderuar W..
Sa i përket kapacitetit, makinat elektrike DC mund të ndahen me kusht në grupet e mëposhtme:
Micromachine ........................... ... më pak se 100 W,
Makina të vogla ........................... nga 100 në 1000 W,
Makinat e fuqisë së ulët ............ .. çdo 1 deri në 10 kW,
Makinat e fuqisë së makinës .............. 10 deri në 100 kW,
Makina të mëdha ........................ .. Çdo 100 deri 1000 kW,
Makinat janë fuqi të lartë .......... më shumë se 1000 kW.
Nga tensione të vlerësuara Makinat elektrike janë të ndara në proces si vijon:
Tension i ulët ................ minia 100 v,
Tension mesatar ............. total 100 deri 1000 v,
Voltazhi i lartë ............... mbi 1000v.
Nga frekuenca e rrotullimit të makinës DC mund të përfaqësohet si:
Paqësor ................ mena 250 rpm.,
Shpejtësia e mesme ......... nga 250 në 1000 rpm,
Me shpejtësi të lartë ............. gjithsej 1000 deri në 3000 rpm.
Ultra-thith ... ..vish 3000 rpm.
Detyra dhe metoda e kryerjes së punës.
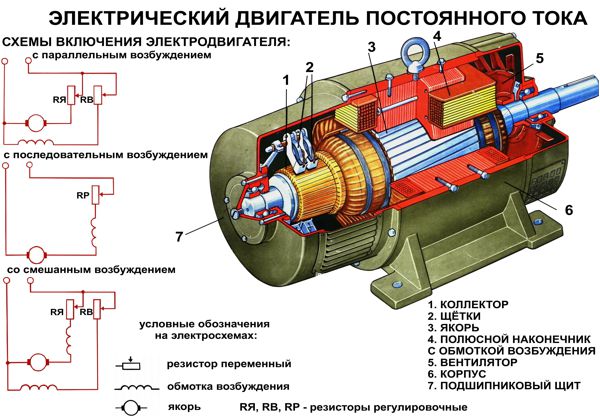
1. Pajisja subjekt dhe qëllimi i pjesëve individuale të makinave elektrike DC.
2. Kryerja e konkluzioneve të makinës DC, në lidhje me dredha-dredha e spirancës dhe në dredha-dredha e ngacmimit.
Konkluzionet që korrespondojnë me këtë ose atë dredha-dredha mund të përcaktohen nga një megommer, një hyrje ose përdorim llambë. Kur përdorni një megommer, një fund është i bashkangjitur në një nga konkluzionet e mbështjelljes, dhe të tjerët kanë të bëjnë me të tjerët. Rezistenca e matur e barabartë me zero do të tregojë korrespondencën e dy konkluzioneve të të njëjtit dredha-dredha.
3. Mbi rezultatet e dredha-dredha spirancë dhe dredha-dredha e ngacmimit. Përcaktojnë llojin e dredha-dredha të ngacmimit (ngacmim paralel ose sekuenciale).
Kjo përvojë mund të kryhet duke përdorur një llambë të lehta të lidhur në mënyrë sekuenciale me mbështjelljet, një tension i vazhdueshëm duhet të furnizohet pa probleme, duke e rritur gradualisht atë në vlerën nominale të specifikuar në pasaportën e makinës.
Duke marrë parasysh rezistencën e ulët të dredha-dredha spirancë dhe dredha-dredha e ngacmimit vijues, drita ndriçon me shkëlqim dhe rezistenca e tyre, e matur nga një megamer (ose omeme) do të jetë pothuajse e barabartë me zero.
Llambë e lehtë e lidhur në mënyrë sekuenciale me dredha-dredha paralele të ngacmimit do të digjet në zbehje. Vlera e rezistencës së dredha-dredha të ngacmimit paralel duhet të jetë brenda 0.3 ... 0.5 com .
Një konkluzion me dredha-dredha spirancë mund të njihet duke bashkëngjitur një fund të megommerit në brushat, duke e prekur atë me fundin e saj të saj në rezultatet e mbështjelljeve në mburojën e makinës elektrike.
Konkluzionet e dredha-dredha të makinës elektrike duhet të përcaktohen në etiketën e kushtëzuar të konkluzioneve të përshkruara në raport.
 Matja e rezistencës ndaj dredhimit dhe rezistencës izoluese. Rezistenca e mbështjelljeve mund të matet sipas skemës së ammotetrit dhe voltmeterit. Rezistenca izoluese midis mbështjelljeve dhe mbështjelljeve në krahasim me strehimin kontrollohet nga një megommer i projektuar për një tension prej 1 kV. Rezistenca izoluese midis dredha-dredha e spirancës dhe dredha e ngacmimit dhe midis tyre dhe rasti nuk duhet të jetë më e ulët 0.5 Mω . Të dhënat e matjes shfaqen në raport.
Matja e rezistencës ndaj dredhimit dhe rezistencës izoluese. Rezistenca e mbështjelljeve mund të matet sipas skemës së ammotetrit dhe voltmeterit. Rezistenca izoluese midis mbështjelljeve dhe mbështjelljeve në krahasim me strehimin kontrollohet nga një megommer i projektuar për një tension prej 1 kV. Rezistenca izoluese midis dredha-dredha e spirancës dhe dredha e ngacmimit dhe midis tyre dhe rasti nuk duhet të jetë më e ulët 0.5 Mω . Të dhënat e matjes shfaqen në raport.
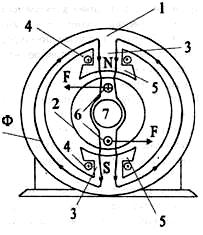
Foto me kusht në seksionin tërthor nga shtyllat kryesore me dredha-dredha e eksitim dhe spirancë me kthesat e dredha-dredha nën shtyllat (si Fig.10.10). Vetëm për të marrë drejtimin e rrymës në mbështjelljet e ngacmimit dhe spirancës. Paraqisni në këto kushte drejtimin e rrotullimit të motorit.
Fik. 11.10. Makinë DC me dy pole:
1 - krevat; 2; 3 - shtyllat kryesore; 4 - dredha-dredha e ngacmimit; 5 - këshilla pole; 6 - spirancë dredha-dredha; 7 - koleksionist; F - Rrjedha fillore magnetike; F është forca që vepron në përçuesit e dredha-dredha spirancë.
Pyetjet e kontrollit dhe detyrat për trajnim të pavarur
1: Shpjegoni pajisjen dhe parimin e funksionimit të motorit dhe gjeneratorit DC.
2. Shpjegoni qëllimin e kolektorit të drejtpërdrejtë aktual.
3. Koncepti i ndarjes së poleve dhe sjell shprehjen për ta përcaktuar atë.
4. Vini re llojet kryesore të mbështjelljeve të përdorura në makinat DC dhe njihni metodat e ekzekutimit të tyre.
5. Mbështetni avantazhet kryesore të motorëve me ngacmim paralel.
6. Cilat janë tiparet e dizajnit të dredha-dredha të ngacmimit paralel në krahasim me dredha-dredha të ngacmimit vijues?
7. Cila është veçoria e fillimit të rrymës së drejtpërdrejtë të ngacmimit të qëndrueshëm?
8. Sa degë paralele kanë një valë të thjeshtë dhe dredha-dredha të thjeshta të makinave DC?
9. Si janë caktuar makinat DC? Krijoni një shembull të përcaktimit.
10. Cila është madhësia e rezistencës izoluese midis mbështjelljeve të makinave DC dhe midis mbështjelljeve dhe rastit?
11. Cila vlerë mund të arrijë aktuale në momentin e fillimit të motorit në mungesë të rezistencës shtesë në zinxhirin e dredha-dredha spirancë?
12. Cila është madhësia e pranimit të motorit të lejuar?
13. Cilat raste lejohen të fillojnë një motor DC pa rezistencë shtesë në qarkun e dredha-dredha të ankorimit?
14. Cila është llogaria Çfarë mund të ndryshoj EMF të një gjeneratori të pavarur të ngacmimit?
15. Cili është qëllimi i shtyllave shtesë të makinës DC?
16. Çfarë ngarkese lejohen të përfshijnë një motor të ngacmimit vijues?
17. Pse përcakton madhësinë e fluksit magnetik kryesor?
18. Njoftoni shprehjet e EQD të Gjeneruesit dhe momentin e rrotullimit të motorit. Jepni konceptin e komponentëve në hyrje.
Puna laboratorike 12.
Qark i motorit.
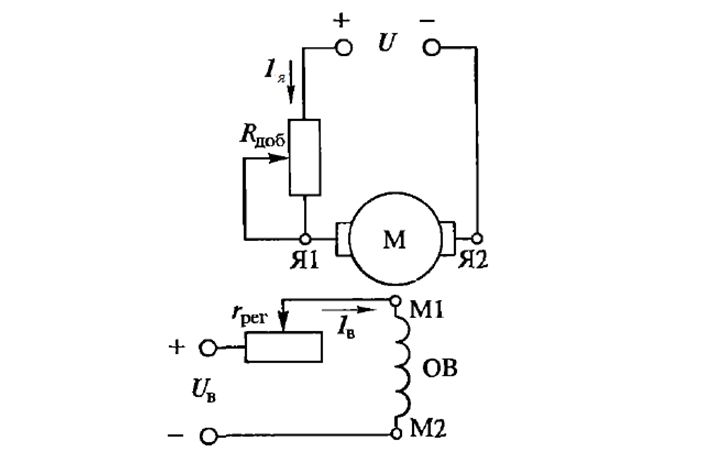
Diagrami i ngacmimit paralel të motorit është treguar në Fig. 1.25. Winding anchor dhe dredha-dredha janë të përfshira paralelisht. Në këtë skemë: Unë - aktuale konsumuar nga motori nga rrjeti, unë - një spirancë aktuale, unë v - rryma e ngacmimit. Nga ligji i parë i Kirchhugës, rrjedh se unë \u003d i + i in.
Karakteristikë natyrore mekanike. Karakteristika natyrore mekanike përshkruhet nga formula (1.6).
Me idling, m \u003d 0 dhe n x \u003d u / s f.
Nëse f \u003d const, atëherë ekuacioni karakteristik mekanik merr formën:
n. = n. H.– b.M, (1.8)
ku b \u003d r i / c e f.
Nga (1.8) rrjedh se karakteristika mekanike (Figura 1.26, direkte 1) është e drejtë me një kënd të animit një dhe një koeficienti këndor B. Meqenëse motorët DC nuk janë të mjaftueshme, atëherë me një rritje të ngarkesës në bosht, frekuenca e rotacionit ndryshon pak - karakteristikat e këtij lloji quhen "të vështira".
Aktgjykimi i konsumuar nga motori nga rrjeti praktikisht rritet në proporcion me momentin e ngarkesës. Në të vërtetë, m em \u003d c m i i f, dhe që nga motori i ngacmimit paralel f \u003d const, pastaj unë ~ M.
Kontrolli i frekuencës së rrotullimit.
Kontrolli i frekuencës së rrotullimit është i mundur nga (1.6) tre metoda: duke ndryshuar fluksin magnetik të shtyllave kryesore f, rezistenca e zinxhirit të ankorimit RI dhe ndryshimi në qarkun e tensionit të tensionit U (ndryshimi n për shkak të ndryshimeve në momenti i ngarkesës m në konceptin e rregullimit nuk është i përfshirë).
 Kontrolli n duke ndryshuar fluksin magnetik F është kryer duke përdorur rregullimin e rrezikut rregullues. Me një rritje në rezistencën e rimëkëmbjes së rrymës së ngacmimit I B dhe fluksi magnetik i shtyllave kryesore f zvogëlohet. Kjo çon, së pari, në një rritje të shpejtësisë së rrotullimit të dadle n x dhe, së dyti, në një rritje në koeficientin b, i.e. në një rritje në këndin e prirjes së karakteristikave mekanike. Megjithatë, B mbetet i vogël dhe ngurtësimi i karakteristikave mekanike është ruajtur. Në Fig. 1.28 Përveç karakteristikave natyrore të 1, që korrespondon me rrjedhën maksimale magnetike F, një familje me karakteristika mekanike 2-4, të marra me një rrjedhje magnetike të reduktuar, është dhënë. Nga karakteristikat rrjedh se një ndryshim në fluksin magnetik mund të rrisë shpejtësinë e rrotullimit në krahasim me karakteristikën natyrore. Pothuajse frekuenca e rotacionit në një metodë të tillë mund të rritet me jo më shumë se 2 herë, pasi rritja e shpejtësisë çon në një përkeqësim të kalimit dhe madje edhe dëmtimit mekanik të makinës.
Kontrolli n duke ndryshuar fluksin magnetik F është kryer duke përdorur rregullimin e rrezikut rregullues. Me një rritje në rezistencën e rimëkëmbjes së rrymës së ngacmimit I B dhe fluksi magnetik i shtyllave kryesore f zvogëlohet. Kjo çon, së pari, në një rritje të shpejtësisë së rrotullimit të dadle n x dhe, së dyti, në një rritje në koeficientin b, i.e. në një rritje në këndin e prirjes së karakteristikave mekanike. Megjithatë, B mbetet i vogël dhe ngurtësimi i karakteristikave mekanike është ruajtur. Në Fig. 1.28 Përveç karakteristikave natyrore të 1, që korrespondon me rrjedhën maksimale magnetike F, një familje me karakteristika mekanike 2-4, të marra me një rrjedhje magnetike të reduktuar, është dhënë. Nga karakteristikat rrjedh se një ndryshim në fluksin magnetik mund të rrisë shpejtësinë e rrotullimit në krahasim me karakteristikën natyrore. Pothuajse frekuenca e rotacionit në një metodë të tillë mund të rritet me jo më shumë se 2 herë, pasi rritja e shpejtësisë çon në një përkeqësim të kalimit dhe madje edhe dëmtimit mekanik të makinës.
Një mënyrë tjetër për të kontrolluar shpejtësinë është e lidhur me përfshirjen në seri me një spirancë të rregullimit RH. R YA.R (Launcher R N për këtë qëllim është i papërshtatshëm, pasi është projektuar për operim afatshkurtër). Formula (1.6) merr formën:
n \u003d  ,
,
nga ku rrjedh se shpejtësia në boshe gjatë çdo rezistencë r ya.r është e njëjtë, dhe koeficienti b dhe, prandaj, pjerrësia e karakteristikave mekanike 5-7 rritet (Figura 1.26). Rregullimi i shpejtësisë së rrotullimit në këtë metodë çon në një rënie në shpejtësinë e rrotullimit në krahasim me karakteristikën natyrore. Përveç kësaj, nuk është ekonomikisht, pasi ajo është e lidhur me një fuqi të lartë të humbjeve (r ya.r i) në humbjen e rregullimit, që rrjedh të gjitha aktuale të ankorimit.
 Metoda e tretë e rregullimit të shpejtësisë së rrotullimit është një ndryshim jo i përballueshëm në rrjedhën e tensionit. Është e mundur vetëm në rastin kur spiranca e motorit mund të aktivizohet nga një burim i veçantë, tensioni i të cilit mund të rregullohet. Gjeneratorë të veçantë ose valvula të kontrolluara (triatronët, ndreqësit e merkurit, thyristorët) përdoren si një burim i rregullueshëm. Në rastin e parë, një sistem i makinave të quajtur z. System (Gjenerator - motor), (Figura 1.27). Përdoret për rregullim të qetë në gamën e gjerë të shpejtësisë së rrotullimit të motorëve të fuqishëm të DC dhe në sistemet kontroll automatik. Sistemi i kontrollit me valvola të kontrolluara të VC (Figura 1.28) përdoret për të rregulluar shpejtësinë e rrotullimit të motorëve me më pak energji. Avantazhi i saj është efikasitet i madh.
Metoda e tretë e rregullimit të shpejtësisë së rrotullimit është një ndryshim jo i përballueshëm në rrjedhën e tensionit. Është e mundur vetëm në rastin kur spiranca e motorit mund të aktivizohet nga një burim i veçantë, tensioni i të cilit mund të rregullohet. Gjeneratorë të veçantë ose valvula të kontrolluara (triatronët, ndreqësit e merkurit, thyristorët) përdoren si një burim i rregullueshëm. Në rastin e parë, një sistem i makinave të quajtur z. System (Gjenerator - motor), (Figura 1.27). Përdoret për rregullim të qetë në gamën e gjerë të shpejtësisë së rrotullimit të motorëve të fuqishëm të DC dhe në sistemet kontroll automatik. Sistemi i kontrollit me valvola të kontrolluara të VC (Figura 1.28) përdoret për të rregulluar shpejtësinë e rrotullimit të motorëve me më pak energji. Avantazhi i saj është efikasitet i madh.
Rregullimi i frekuencës së rrotullimit u është praktikisht e mundur vetëm drejt uljes, pasi rritja e tensionit është më e lartë se nominale e papranueshme për shkak të përkeqësimit të mprehtë në kalimin. Nga (1.9) rrjedh se kur tension zvogëlohet, shpejtësia e papastër është zvogëluar dhe pjerrësia e karakteristikave mekanike të 8-10 nuk ndryshon (shih figurën 1.26), ata mbeten të ashpër edhe tensione të ulëta. Gama e rregullimit (n max / n min) në këtë mënyrë 6: 1-8: 1. Mund të zgjerohet në mënyrë të konsiderueshme kur aplikoni qarqe të veçanta inversi.
Karakteristikat rregulluese.
Karakteristika e rregullimit n \u003d f (i c) e motorit të ngacmimit paralel është treguar në Fig. 1.29.
Karakteri i saj përcaktohet nga varësia (1.5), nga e cila rrjedh se shpejtësia e rrotullimit është në mënyrë proporcionale me rrjedhën magnetike dhe, për këtë arsye, ngacmimi i tanishëm I B. Në ngacmimin aktual IB \u003d 0, të cilat mund të jenë kur zinxhiri i ngacmimit është i prerë, fluksi magnetik është i barabartë me mbetjet f, dhe shpejtësia e rrotullimit bëhet aq e madhe sa që motori mund të jetë i shembur mekanikisht - një fenomen i tillë quhet motor .
Fenomeni fizik është shpjeguar nga fakti se çift rrotullues (1.2), me një rënie në fluksin magnetik, do të duket, duhet të ulet, por ankorimi i tanishëm i \u003d (u - e) / r rritet ndjeshëm, pasi zvogëlohet e (1.1) dhe ndryshimi u - rritet në një masë më të madhe (zakonisht e "0.9 u).
 Mënyrat e frenave.
Mënyrat e frenave.
Mënyrat e frenimit të motorit ndodhin kur momenti elektromagnetik i zhvilluar nga motori vepron kundër drejtimit të rrotullimit të spirancës. Ato mund të ndodhin gjatë operimit të motorit kur kushtet e punës ndryshojnë ose krijojnë artificialisht në mënyrë që të zvogëlojë shpejt shpejtësinë, të ndalojnë ose të përmbysin motorin.
Motori i ngacmimit paralel është i mundur tre mënyra të frenave: frenuesi i frenimit me kthimin e energjisë në rrjet, frenimi me anti-test dhe frenim dinamik.
Gjenerator frenim Kjo ndodh në rastet kur shpejtësia e rrotullimit të një spirance n bëhet më e madhe se shpejtësia e rrotullimit në ideal (i.e., në m φ \u003d 0) duke idling n x (n\u003e n x). Kalimi në këtë mënyrë nga modaliteti i motorit është i mundur, për shembull, kur është projektuar ngarkesa, kur momenti i krijuar nga ngarkesa është aplikuar për të ankoruar në të njëjtën drejtim si momenti elektromagnetik i motorit, i.e. Pastaj kur momenti i ngarkesës vepron sipas çift rrotullues elektromagnetik të motorit dhe fiton një shpejtësi më të madhe se n x. Nëse n\u003e nx, pastaj e\u003e uc (ku uc - tension të rrjetit) dhe aktuale motorike ndryshon shenjën e saj (1.4) - momenti elektromagnetik nga rrotullimi bëhet frenave dhe makina nga modaliteti i motorit shkon në modalitetin e gjeneratorit dhe jep energji në rrjet (rimëkëmbja e energjisë). Kalimi i makinës nga regjimi motorik në gjenerator ilustrohet nga një karakteristikë mekanike (Figura 1.30). Lëreni në mënyrën e motorit një 1 - pika operative; Ai korrespondon me MM-në nëse rritet shpejtësia e rrotullimit, pika e operimit sipas karakteristikës 1 të kuadrantit i kalon në kuadrin II, për shembull, në pikën operative një 2, e cila korrespondon me frekuencën e rrotullimit n dhe pikën e frenimit - M .
Frenim kundërshtimkjo ndodh në motorin e drejtimit kur drejtimi i rrymës në ankorimin ose ngacmimet e tanishme kalon në të kundërtën. Momenti elektromagnetik ndryshon shenjën dhe bëhet frena.
Motori me drejtim të kundërt të rotacionit korrespondon me karakteristikat mekanike të vendosura në kuadrante II dhe III (për shembull, karakteristika natyrore 2 në Fig. 1.30).
Një tranzicion i papritur në këtë karakteristikë është pothuajse i papranueshëm, pasi shoqërohet nga një pishtar tepër i madh dhe i frenimit. Për këtë arsye, në të njëjtën kohë me kalimin e një prej mbështjelljeve në zinxhirin e ankorimit, rezistenca shtesë r ext, e cila kufizon aktualin e ankorimit.
Karakteristika mekanike e mënyrës me r është një anim i madh (drejt 3). Kur kaloni në mënyrën antivjeçare, norma e rrotullimit n në herën e parë nuk mund të ndryshojë (për shkak të ankorimit të inercisë) dhe pikës operative nga pozicioni A 1 do të shkojë në pozicionin një 3 karakteristikë e re. Për shkak të shfaqjes së torusit m, frekuenca e rrotullimit n do të bjerë shpejt deri në pikën operative një 3 nuk kalon në një pozicion 4 që korrespondon me ndalimin e motorit. Nëse në këtë moment motori nuk e fikur burimin e energjisë, atëherë spiranca do të ndryshojë drejtimin e rrotullimit. Makina do të fillojë të punojë në modalitetin e motorit me një drejtim të ri të rrotullimit, dhe pika e saj operative një 5 do të jetë në karakteristikën mekanike 3 në kuadrant III.
 Dinamik frenimkjo ndodh në rastet kur spiranca e motorit është e shkëputur nga rrjeti dhe mbyllet në rezistencën e frenimit dinamik r d.t. Karakteristikat Ekuacioni (1.6) merr formën:
Dinamik frenimkjo ndodh në rastet kur spiranca e motorit është e shkëputur nga rrjeti dhe mbyllet në rezistencën e frenimit dinamik r d.t. Karakteristikat Ekuacioni (1.6) merr formën:
n \u003d 
ajo që korrespondon me familjen e drejtpërdrejtë 4 (me RD të ndryshëm) duke kaluar përmes origjinës së koordinatave. Kur kaloni në këtë mënyrë, pika operative një 1 lëviz në një nga karakteristikat 4, për shembull, në një pikë një 6, dhe pastaj lëviz direkt 4 në zero. Spiranca e motorit është frenuar deri në një ndalesë të plotë. Duke ndryshuar rezistencën r d. Ju mund të rregulloni shpejtësinë aktuale dhe të frenimit të ankorimit.
Ka disa varietete të mundshme të ndërtimit të një email-i që vepron nga burimi tension të vazhdueshëm. Parimi i veprimit të tyre është i njëjtë, dhe dallimet duhet të lidhin dredha-dredha (s) dhe ankorat (et).
Emri i motorit DC me ngacmim paralel është marrë për shkak se dredha e saj, unë dhe ob janë të lidhur me njëri-tjetrin në këtë mënyrë. Motor elektrik i një shumëllojshmëri të tillë siguron mënyrat e nevojshme, duke tejkaluar produktet e llojeve të vazhdueshme dhe të përziera kur merr një shpejtësi praktikisht konstante të funksionimit të saj.
- Përfundim
Ndërtimi i motorit dhe aplikimi i tij
Qarku i llojit të tipit në shqyrtim është paraqitur më poshtë.
Nga ajo vijon prej tij:
- totali i konsumuar nga e-mail nga burimi është i \u003d i π + i në, ku unë, unë v - rrymat, spiranca, pëshpëritja e ngacmimit, respektivisht;
- në të njëjtën kohë, unë nuk varet nga unë, domethënë, nuk varet nga ngarkesa.
Parimi i funksionimit të motorit elektrik përcakton pronat e tij të tërheqjes. Pajisja është përdorur kur fillimi nuk kërkon një moment të lartë, domethënë, kur mënyrat operative të mekanizmave të makinës nuk marrin krijimin e ngarkesave të mëdha fillestare. Kjo është zakonisht për mjetet e makinës dhe tifozët.
Për praktikë, vlerësohen parametra të tillë të dobishëm të mekanizmave të ngjashëm të postës elektronike
- stabiliteti i punës në luhatjet e ngarkesës;
- efikasitet të lartë për shkak të faktit se unë nuk vazhdoj përmes s.
Duke filluar me momentin e pamjaftueshëm sigurohet nga kalimi në një skemë të tipit të përzier.
Sjellja e elektromotorit kur ndryshon ngarkesa
Karakteristika mekanike tregon stabilitetin e operacionit elektromotor në një gamë të gjerë ndryshimesh të ngarkesës, duke përshkruar varësinë e pikës së gjeneruar nga e-mail, nga shpejtësia e funksionimit të boshtit.
Karakteristikat tërheqëse të llojit të llojit në konsideratë ju lejojnë të mbani vlerën e momentit me një ndryshim të rëndësishëm në numrin e revolucioneve të boshtit. Në mënyrë tipike, parametrat e tërheqjes së njësisë duhet të zvogëlojnë këtë parametër në jo më shumë se 5%. Një studim i thjeshtë tregon: parametrat e frenave për shkak të proceseve të kthyeshme janë të ngjashme. Këto dispozita gjithashtu zbatohen për përdorimin e ngacmimit të përzier.
Me fjalë të tjera, një karakteristikë e vështirë është karakteristike e një email të tillë. Kjo natyrë e punës konsiderohet si një avantazh i rëndësishëm i llojit të tipit në fjalë.
Varietetet e qasjeve për rregullimin e shpejtësisë së rrotullimit
Parimi i përfshirjes paralele të mbështjelljes siguron filloj Në kombinim me një gamë të gjerë ndryshimesh në numrin e rollers të boshtit në procesin e punës me ndihmën e përsëritjeve. Ato gjithashtu ofrojnë një normë normale të motorit nga kufizimi aktual.
Për njësitë paralele të tipit, mënyra për të kontrolluar shpejtësinë e operimit sipas ndryshimit:
- fluksi magnetik i shtyllave kryesore;
- ankorat e zinxhirit të rezistencës;
- tensionit të furnizuar për të.
Objekti i ekspozimit është dredha-dredha e ngacmimit, dredha-dredha e ankorimit, tensionit të tij operativ.
Ndryshimi në fluksin magnetik kryhet me ndihmën e një lumi RF sekuenciale. Me një rritje të rezistencës së saj, OB kalon një rrymë më të vogël, e cila shoqërohet me një rënie në fluksin magnetik. Manifestimi i jashtëm i veprimeve të tilla bëhet rritja e numrit të revolucioneve. idling. Studimi tregon se ndodh një rritje në këndin e prirjes.
Parimi i dytë bazohet në përfshirjen e një ankorimi ankorim të ankoruar rregullim shtesë të qëndrueshëm. Me një rritje në rezistencën e saj, shpejtësia e rotacionit është zvogëluar, ndërsa karakteristika e saj natyrore mekanike fiton një shpat më të madh. Për shkak të përfshirjes së qëndrueshme me dredha-dredha kryesore të lejeve të rezistencës shtesë, në të cilën shpërndan energji të konsiderueshme, ndodh një rënie e dukshme në efikasitet.
Parimi i tretë shoqërohet me një ndërlikim të caktuar të zgjidhjeve të qarkut dhe kërkon përdorimin e një burimi të veçantë të energjisë të rregullueshme duke ruajtur mundësinë e rregullimit të veçantë. Nëse zbatohet në kushte reale, vetëm një rënie në frekuencën e rrotullimit të boshtit është e mundur.
Motori i pavarur i ngacmimit
Automjeti i pavarur DC zbaton qasjen e tretë të rregullores dhe është interesante sepse OB dhe M ushqyer në burime të ndryshme, skema e saj është paraqitur më poshtë.
Për motorët në këtë dizajn konstruktiv, është instaluar i pandryshuar, por vetëm tensioni i aplikuar për M. Kjo shoqërohet me një ndryshim në numrin e rrotullimit të boshtit në boshe, por ngurtësia e karakteristikave të ndryshimit nuk i nënshtrohet.
Parimi i funksionimit të një agregati të tillë për shkak të funksionimit të pavarur të dy burimeve është më kompleks. Megjithatë, përdorimi i tij jep përparësi të tilla të rëndësishme për të
- funksionimin e qetë ekonomik të shpejtësisë funksionale me thellësi të madhe;
- duke filluar një motor nën tension të reduktuar pa një rresht.
Në rast se fillimi ndodh në tension normal, mbajtësi kufizon vlerën e I B.
Studimi tregon se vlera maksimale e numrit të revolucioneve është e kufizuar vetëm nga rezistenca m, dhe minimumi - kushtet për shkarkimin e nxehtësisë të lëshuar gjatë operacionit.
Karakteristikat në drejtim të konsumit të energjisë dhe shpejtësisë së sistemit të kontrollit janë përmirësuar në rastin e përfshirjes sekuenciale me m të rregullatorëve të ndryshëm të tiristorëve. Për të instaluar numrin e revolucioneve të boshtit dhe stabilizimin e tyre në procesin e sjelljes së lëvizjes së mekanizmave të ndryshëm që do të përdoren metoda të ndryshme. E tyre të përbashkët shenjë karakteristike Është përfshirja e një rregullatori të tiranit në një zinxhir reagimi negativ frekuencë. Fillimi i një agregate të tillë kërkon zbatimin e procedurave të veçanta.
Përfundim
Një motor paralel i ngacmimit është një mekanizëm shumë fleksibël i makinës dhe mund të përdoret në një numër shumë të madh të zonave ku momentet e mëdha nuk kërkohen kur fillojnë. Ajo ka qarqe të thjeshta dhe të besueshme të kontrollit të shpejtësisë, ka thjeshtësinë e fillimit.