Спосіб визначення номінальної частоти обертання ротора електростатичного гіроскопа. Механічні характеристики асинхронних двигунів
Асинхронний двигун перетворює електричну енергію в механічну. Механічна характеристика асинхронного двигуна, електромеханічна і інші містять інформацію, без якої неможлива його правильна експлуатація.
Ця конструкція досить широко застосовується в різних сферах людської життєдіяльності. Без них немислима робота верстатів, транспортерів, підйомно-транспортних машин. Двигуни, що володіють невеликою потужністю, широко використовуються в автоматиці.
- механічна характеристика
- робочі характеристики
Пристрій асинхронної машини
Класична асинхронна машина складається з 2 основних частин: ротора (рухомого) і статора (нерухомою). Три окремі фази складають обмотку статора. С1, С2 і С3 - позначення початку фаз. С3, С4 і С5 - відповідно кінці фаз. Всі вони під'єднані до клемних роз'єму за схемою зірка або трикутник, що показано на малюнках а, б, в. Схему вибирають враховуючи паспортні дані двигуна і напруга в електромережі.
Статор створює усередині електродвигуна магнітне поле, яке постійно обертається.
Ротор розрізняють короткозамкнутий і фазний.
У короткозамкненим швидкість обертання не регулюється. Конструкція з ним простіше і дешевше. Однак пусковий момент у нього занадто малий у порівнянні з машинами, у яких фазний ротор. Тут швидкість обертання регулюється за рахунок можливості введення додаткового опору.
Принцип роботи асинхронної машини
Подаючи напругу на обмотку статора, по кожній фазі можна спостерігати змінюються магнітні потоки, які по відношенню один до одного зміщені на 120 градусів. Загальний результуючий потік виходить, що обертаються або створює ЕРС всередині провідників ротора.
Там з'являється струм, який у взаємодії з результуючим потоком створює пусковий момент. Це призводить до обертання ротора.
Виникає ковзання S, т. Е. Різницю між частотою обертання самого ротора n2 і частотою магнітного поля статора n1. Спочатку воно дорівнює 1. Згодом частота зростає, різниця n1 - n2 зменшується. Це веде до зменшення крутного моменту.
На холостому ходу ковзання мінімально. Воно сягає критичної позначки Sкр, коли збільшується статичний момент. Перевищення Sкр веде до нестабільної роботи машини.
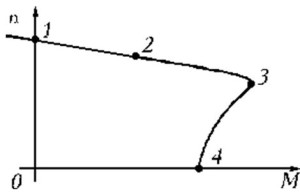
механічна характеристика
Як основна, допомагає проводити детальний аналіз роботи електродвигуна. Вона висловлює безпосередню залежність частоти обертання самого ротора від електромагнітного моменту n \u003d f (M).
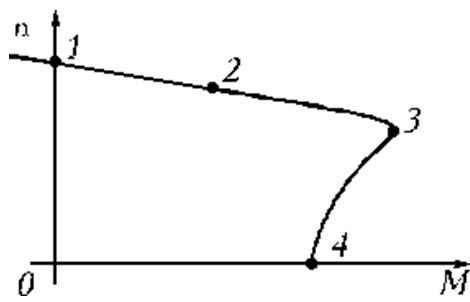 З графіка видно, що на ділянці 1-3 машина працює стійко. 3-4 - безпосередній відрізок нестійкої роботи. Ідеальний холостий хід відповідає точці 1.
З графіка видно, що на ділянці 1-3 машина працює стійко. 3-4 - безпосередній відрізок нестійкої роботи. Ідеальний холостий хід відповідає точці 1.
Точка 2 - номінальний режим роботи. Точка 3 - частота обертання досягла критичної позначки. Пусковий момент Мпуск - точка 4.
Існують технічні способи розрахунків і побудови механічної характеристики з урахуванням даних паспорта.
У початковій точці 1 n0 \u003d 60f / p (p - кількість пар полюсів). Оскільки nн і Mн безпосередньо координати точки 2, розрахунок номінального моменту здійснюється за формулою Mн \u003d 9,55 * Рн / n н, де Рн - номінальна потужність. Значення n н зазначено в паспорті двигуна. У точці 3 Mкр \u003d Mнλ. Пусковий момент в точці 4 Mпуск \u003d Mн * λпуск (значення λ, λпуск - з паспорта).
Механічна характеристика, побудована таким чином, називається природною. Змінюючи інші параметри можна отримати штучну механічну характеристику.
Отримані результати дають можливість проаналізувати і узгодити механічні властивості самого двигуна і робочого механізму.
електромеханічна характеристика
Вона являє собою залежність кутової швидкості обертання від струму статора. Використовуючи кілька опорних точок можна побудувати електромеханічну характеристику. Номінальний струм розраховується за формулою:

Струм холостого ходу становить 30-40% від номінального.
Формула розрахунку при критичному ковзанні:
Струм в початковий момент пуску:
Всі значення відображають електромеханічну характеристику.
робочі характеристики
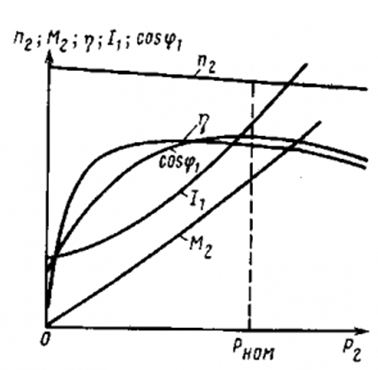 робочі характеристики асинхронного електродвигуна - це взаємозв'язок декількох параметрів від корисної потужності P2. В їх число входять: частота обертання самого ротора n2, момент на валу М, ковзання S, ток статора I1, що витрачається потужність P, коефіцієнт потужності СОSφ і ККД.
робочі характеристики асинхронного електродвигуна - це взаємозв'язок декількох параметрів від корисної потужності P2. В їх число входять: частота обертання самого ротора n2, момент на валу М, ковзання S, ток статора I1, що витрачається потужність P, коефіцієнт потужності СОSφ і ККД.
причому частота електричного струму і напруга незмінні, на відміну від навантаження.
Як правило, робочі характеристики асинхронного двигуна будуються в діапазоні значень ковзання від 0 до значення, що перевищує номінальну на 10%. Це зона, де машина працює стійко.
Частота обертання ротора n2 зменшується при зростанні навантаження на валу. Але ці зміни не перевищують 5%. Струм I1 зростає, оскільки при подальшому збільшенні навантаження його активна складова перевищує реактивну.
СОSφ при холостому ході малий. Але потім він зростає. При підвищених навантаженнях СОSφ зменшується через зростаючого всередині обмотки ротора реактивного опору.
ККД холостого ходу дорівнює 0. Зі збільшенням навантаження спостерігається його різке зростання, а згодом, зниження.
У даній статті висвітлимо тему механічних і електричних характеристик електродвигунів. На прикладі асинхронного двигуна розглянемо такі параметри як потужність, робота, ККД, косинус фі, крутний момент, кутова швидкість, лінійна швидкість і частота. Всі ці характеристики виявляються важливими при проектуванні обладнання, в якому електродвигуни служать в якості приводних. Сьогодні особливо широко поширені в промисловості саме асинхронні електродвигуни, тому на їх характеристиках і зупинимося. Для прикладу розглянемо АІР80В2У3.
На табличці (на табличці) електродвигуна вказується завжди номінальна механічна потужність на валу даного двигуна. Це не та електрична потужність, яку даний електродвигун споживає з мережі.
Так, наприклад, для двигуна АІР80В2У3, номінал в 2200 ват відповідає саме механічної потужності на валу. Тобто в оптимальному робочому режимі даний двигун здатний виконувати механічну роботу 2200 джоулів кожну секунду. Позначимо цю потужність як P1 \u003d Потужність 2200 Вт.

Щоб визначити номінальну активну електричну потужність асинхронного електродвигуна, спираючись на дані з шильдіка, необхідно взяти до уваги ККД. Так, для даного електродвигуна ККД становить 83%.

Що це означає? Це означає, що тільки частина активної потужності, яка подається з мережі на обмотки статора двигуна, і безповоротно споживаної двигуном, перетвориться в механічну потужність на валу. Активна потужність дорівнює P \u003d P1 / ККД. Для нашого прикладу, за представленим шильдіку бачимо, що P1 \u003d 2200, ККД \u003d 83%. Значить P \u003d 2200 / 0,83 \u003d 2650 Вт.
Повна електрична потужність, що подається на статор електродвигуна від мережі завжди більше механічної потужності на валу і більше активної потужності, безповоротно споживаної електродвигуном.

Для знаходження повної потужності досить активну потужність розділити на косинус фі. Таким чином, повна потужність S \u003d P / Cosφ. Для нашого прикладу P \u003d 2650 Вт, Cosφ \u003d 0,87. Отже повна потужність S \u003d 2650 / 0,87 \u003d 3046 ВА.
Номінальна реактивна електрична потужність асинхронного електродвигуна
Частина повної потужності, яка подається на обмотки статора асинхронного електродвигуна, повертається в мережу. Це.
Q \u003d √ ( S 2 - P 2)
Реактивна потужність пов'язана з повною потужністю через sinφ, і пов'язана з активною і з повною потужністю через квадратний корінь. Для нашого прикладу:
Q \u003d √ (3046 2 - 2650 2) \u003d 1502 ВАР
Реактивна потужність Q вимірюється в ВАР - в вольт-амперах реактивних.
Тепер давайте розглянемо механічні характеристики нашого асинхронного двигуна: номінальний робочий момент на валу, кутову швидкість, лінійну швидкість, частоту обертання ротора і її зв'язок з частотою живлення електродвигуна.
На табличці ми бачимо, що при харчуванні змінним струмом, ротор двигуна робить при номінальному навантаженні 2870 оборотів в хвилину, позначимо цю частоту як n1.

Що це означає? Оскільки магнітне поле в обмотках статора створюється змінним струмом частотою 50 Гц, то для двигуна з однією парою полюсів (яким є АІР80В2У3) частота «обертання» магнітного поля, синхронна частота n, виявляється рівною 3000 оборотів в хвилину, що тотожне 50 оборотам в секунду. Але оскільки двигун асинхронний, то ротор обертається з відставанням на величину ковзання s.
Значення s можна визначити, розділивши різницю синхронної і асинхронної частот на синхронну частоту, і висловивши це значення в процентах:
s \u003d ((n - n1) / n) * 100%
Для нашого прикладу s \u003d ((3000 - 2870) / 3000) * 100% \u003d 4,3%.

Кутова швидкість ω виражається в радіанах в секунду. Для визначення кутової швидкості досить частоту обертання ротора n1 перевести в обороти в секунду (f), і помножити на 2 Пі, оскільки один повний оборот становить 2 Пі або 2 * 3,14159 радіан. Для двигуна АІР80В2У3 асинхронна частота n1 становить 2870 обертів на хвилину, що відповідає 2870/60 \u003d 47,833 оборотів в секунду.
Помноживши на 2 Пі, маємо: 47,833 * 2 * 3,14159 \u003d 300,543 рад / с. Можна перевести в градуси, для цього замість 2 Пі підставити 360 градусів, тоді для нашого прикладу вийде 360 * 47,833 \u003d 17220 градусів в секунду. Однак подібні розрахунки зазвичай ведуть саме в радіанах в секунду. Тому кутова швидкість ω \u003d 2 * Пі * f, де f \u003d n1 / 60.
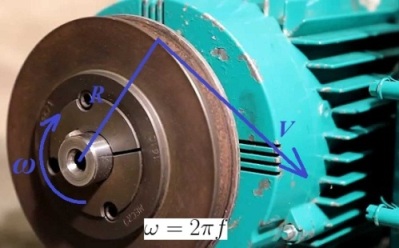
Лінійна швидкість v відноситься до обладнання, на якому асинхронний двигун встановлений в якості приводу. Так, якщо на вал двигуна встановлений шків або, скажімо, наждачний диск, відомого радіуса R, то лінійна швидкість точки на краю шківа або диска може бути знайдена за формулою:
v \u003d ωR
Кожен асинхронний електродвигун характеризується номінальним крутним моментом Мн. Момент, що обертає М пов'язаний з механічною потужністю P1 через кутову швидкість наступним чином:
P \u003d ω М
Момент, що обертає або момент сили, що діє на певній відстані від центру обертання, для двигуна зберігається, причому з ростом радіуса зменшується сила, а ніж радіус менше, тим більше сила, оскільки:
М \u003d FR
Так, чим більше радіус шківа, тим менша сила діє на його краю, а найбільша сила діє безпосередньо на валу електродвигуна.

Для наведеного як приклад двигуна АІР80В2У3 потужність P1 дорівнює Потужність 2200 Вт, а частота n1 дорівнює 2870 оборотів в хвилину або f \u003d 47,833 обороту в секунду. Отже кутова швидкість становить 2 * Пі * f, тобто 300,543 рад / с, і номінальний крутний момент Мн дорівнює P1 / (2 * Пі * f). Мн \u003d 2200 / (2 * 3,14159 * 47,833) \u003d 7,32 Н * м.
Таким чином, виходячи з даних, зазначених на табличці асинхронного електродвигуна, можна знайти всі основні електричні та механічні його параметри.
Сподіваємося, що дана стаття допомогла вам розібратися в тому, як пов'язані між собою кутова швидкість, частота, що обертає момент, активна, корисна і повна потужність, а також ККД електродвигуна.
Балаковської ІНСТИТУТ ТЕХНІКИ, ТЕХНОЛОГІЇ ТА УПРАВЛІННЯ
ФАКУЛЬТЕТ ІНЖЕНЕРНО - БУДІВЕЛЬНА
КАФЕДРА «УПРАВЛІННЯ ТА ІНФОРМАТИКА В ТЕХНІЧНИХ СИСТЕМАХ
ПРАКТИЧНА РОБОТА №4
за дисципліною
електромеханічні системи
РОЗРАХУНОК ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГУНА
варіант 13
Виконав: ст. гр. УІТ - 53
Колотілін І.С.
Мефёдова Ю. А.
Завдання 1. Трифазний асинхронний двигун з короткозамкненим ротором типу АИР 180 М2, який використовується в якості електроприводу насосного агрегату консольного типу марки ВК 10/45, призначеного для перекачування води для технічних потреб, негорючих і нетоксичних рідин, має наступні номінальні дані: потужність на валу Р 2н = 30 кВт; ковзання S н = 0,025 (2,5%); синхронна частота обертання n 1 н \u003d 3000 об / хв; коефіцієнт корисної дії η н \u003d 0,905 (90,5%); коефіцієнт потужності обмотки статора cos φ н \u003d 0,88. Відомі також: ставлення пускового моменту до номінального М п / М н \u003d 1,7; відношення пускового струму до номінального I п / I н \u003d 7,5; відношення максимального (критичного) крутного моменту до номінального М max / M н \u003d 2,7. Харчування двигуна здійснюється від промислової мережі змінного струму 380/220 В, 50 Гц. Потрібно визначити:
номінальну частоту обертання ротора двигуна;
крутний номінальний, критичний і пусковий моменти двигуна;
потужність, споживану двигуном з мережі Р 1 н;
номінальний і пусковий струмі;
5) пусковий струм і обертаючі моменти, якщо напруга в мережі знизилося по відношенню до номінального на 5, 10 і 15% (U c \u003d 0,95 ∙ U н; U c \u003d \u003d 0,9 ∙ U н; U c \u003d 0,85 ∙ U н).
1. Номінальна частота обертання:
n 2н \u003d n 1 н ∙ (1 - S н ) \u003d 3000 ∙ (1 - 0,025) \u003d 2925 об / хв.
2. Номінальний обертальний момент на валу:
3. Пусковий крутний момент двигуна:
М п \u003d 1,7 ∙ М н \u003d 1,7 ∙ 97,95 \u003d 166,5 Н ∙ м.
4. Максимальний крутний момент:
М m ах \u003d 2,7 ∙ М н \u003d 2,7 ∙ 97,95 \u003d 264,5 Н ∙ м.
5. Номінальну потужність Р 1 н, споживану двигуном з мережі, визначимо з виразу:
η н \u003d Р 2н / Р 1 н Р 1 н \u003d Р 2н / η н \u003d 30 / 0,905 \u003d 33,15 кВт;
при цьому номінальний струм, Споживаний двигуном з мережі, може бути визначений із співвідношення:
а пусковий струм при цьому буде:
I n = 7,5 ∙ I 1н \u003d 7,5 ∙ 57 \u003d 427,5 А.
6. Визначаємо крутний момент при зниженні напруги в мережі:
- на 5%. При цьому на двигун буде подано 95% U H , або U \u003d 0,95 ∙ U н . Так як відомо, що обертає момент на валу двигуна пропорційний квадрату напруги М ≡U 2, то він складе (0,95) 2 \u003d 0,9 від номінального. Отже, пусковий обертовий момент буде:
М 5% \u003d 0,90 ∙ М п = 0,9 ∙ 166,5 \u003d 149,9 Н ∙ м;
- на 10%. При цьому U \u003d 0,9 ∙ U н ;
M 10 % \u003d 0,81 ∙ М п \u003d 0,81 ∙ 166,5 \u003d 134,9 Н ∙ м;
- на 15%. В даному випадку U = 0,85 ∙ U н;
М 15% \u003d 0,72 ∙ 166,5 \u003d 119,9 Н ∙ м.
Відзначимо, що робота на зниженому на 15% напрузі мережі допускається, наприклад, у баштових кранів тільки для завершення робочих операцій і приведення робочих органів в безпечне положення.
7. Знаходимо, як впливає аналогічне зниження напруги на пусковий струм двигуна I п:
- на 5%. З огляду на, що пусковий струм можна наближено вважати пропорційним першого ступеня напруги мережі, отримаємо:
I П5 % ≈0,95 ∙ I п = 0,95 ∙ 427,5 \u003d 406,1 А;
I П10 % ≈0,9 ∙ I п = 0,9 ∙ 427,5 \u003d 384,8 А;
I П15 % ≈0,85 ∙ I п \u003d 0,85 ∙ 427,5 \u003d 363,4 А.
Завдання 2.Трифазний асинхронний двигун з короткозамкненим ротором типу АИР 13256 має такі номінальні дані: потужність на валу Р 2н = 5,5 кВт; ковзання S н = 0,04 (4%); синхронна частота обертання n 1 н \u003d 1000 об / хв; коефіцієнт корисної дії η н \u003d 0,85 (85%); коефіцієнт потужності обмотки статора cos φ н \u003d 0,8. Відомі також: ставлення пускового моменту до номінального М п / М н \u003d 2; відношення пускового струму до номінального I п / I н \u003d 7; відношення максимального (критичного) крутного моменту до номінального М max / M н \u003d 2,2. Харчування двигуна здійснюється від промислової мережі змінного струму 380/220 В, 50 Гц.
Визначити потужність, споживану двигуном з промислової мережі змінного струму 220/380 В, 50Гц, струм в ланцюзі статора при включенні в мережу 220 / 380В і 220 / 127В, номінальні крутний момент на валу двигуна.
1. Потужність, споживана трифазним двигуном з мережі при номінальному режимі роботи:
Р 1 н \u003d Р 2н / η н \u003d 5,5 / 0,85 \u003d 6,47кВт.
2. Струм, споживаний обмоткою статора з мережі при з'єднанні обмотки:
- зіркою:
- трикутником:
3. Номінальний обертальний момент на валу двигуна.
Спочатку знайдемо номінальну частоту обертання:
n 2н \u003d n 1 н ∙ (1 - S н ) \u003d 1000 ∙ (1 - 0,04) \u003d 960 об / хв.
4. Знаходимо число пар полюсів р обмотки статора, маючи на увазі, що частота промислової мережі f= 50 Гц:

Завдання 3.Для приводу промислової вентиляційної установки використовується трифазний асинхронний двигун з короткозамкненим ротором типорозміру АІР 13256. Використовуючи його технічні дані, наведені в завданні 2, Побудувати для нього механічну характеристику у вигляді залежності n 2 = f (М).
З виразу:

де n 2н - частота обертання ротора двигуна при номінальному навантаженні;
n 1 - синхронна частота обертання магнітного поля статора (в цьому випадку n 1 \u003d 1000 об / хв);
S н - ковзання при номінальному навантаженні (S H = 0,04)
Визначається величина частоти обертання ротора двигуна в номінальному режимі:
n 2н = Тисячі ∙ (1 - 0,04) \u003d 960 об / хв.
2. За значеннями S н і  , Знаходимо критичне ковзання:
, Знаходимо критичне ковзання:
3. Знаходимо номінальний Мном і максимальний (критичний) М m ах моменти:
4. Для побудови механічної характеристики скористаємося формулами:
 ,
,
де S - поточне значення ковзання.
Переймаючись значеннями S від 1 до 0, з необхідним кроком (наприклад так, як показано в таблиці 3) обчислюємо величини n і М, їм відповідні. Результати заносимо в цю таблицю і по ним будуємо механічну характеристику n 2 = f (М).
На ній відзначимо (*) А, відповідну номінального режиму роботи.
Таблиця 1 - Результати розрахунку механічної характеристики електродвигуна
|
n, об / хв | ||||||||||||
|
M , Н · м |
![]()
Малюнок 1 - Механічна характеристика трифазного асинхронного двигуна п 2 = f(M) .
Реферат виконав ст-т 6-ого куса, 12 гр., Спец. 1801, Полукаров А.Н.
Самарський Державний Технічний Університет
Кафедра «Електромеханіка і нетрадиційна енергетика»
Самара, 2006
1. Введення.
Загальні відомості про асинхронних машинах.
Асинхронною машиною називається двохобмотувальні електрична машина змінного струму, у якої тільки одна обмотка (первинна) отримує харчування від електричної мережі з постійною частотою ω1, а друга обмотка (вторинна) замикається накоротко або на електричні опори. Токи у вторинній обмотці з'являються в результаті електромагнітної індукції. Їх частота ω2 є функцією кутової швидкості ротора Ω, яка в свою чергу залежить від крутного моменту, прикладеного до вала.
Найбільшого поширення набули асинхронні машини з трифазної симетричною разноіменнополюсной обмоткою на статорі, що живиться від мережі змінного струму, і з трифазної або багатофазної симетричною разноіменнополюсной обмоткою на роторі.
Машини такого виконання називають просто « асинхронними машинами», В той час як асинхронні машини інших виконань відносяться до« спеціальним асинхронним машинам ».
Асинхронні машини використовуються в основному як двигуни; в якості генераторів вони застосовуються вкрай рідко.
Асинхронний двигун є найбільш поширеним типом двигуна змінного струму.
Разноіменнополюсная обмотка ротора асинхронного двигуна може бути короткозамкненою (біляча клітина) або фазної (приєднується до контактних кілець). Найбільшого поширення мають дешеві у виробництві і надійні в експлуатації двигуни з короткозамкненою обмоткою на роторі, або короткозамкнені двигуни. Ці двигуни мають жорсткої механічною характеристикою (при зміні навантаження від холостого ходу до номінальної їх частота обертання зменшується всього на 2-5%).
Двигуни з короткозамкненою обмоткою на роторі мають також досить високим початковим пусковим моментом, що обертає. Їх основні недоліки: труднощі здійснення плавного регулювання частоти обертання в широких межах; споживання великих струмів з мережі при пуску (в 5-7 разів перевищують поминальний струм).
Двигуни з фазною обмоткою на роторі або двигуни з контактними кільцями позбавлені цих недоліків ціною ускладнення конструкції ротора, що призводить до їх помітного подорожчання у порівнянні з короткозамкненими двигунами (приблизно в 1,5 рази). Тому двигуни з контактними кільцями на роторі знаходять застосування лише при важких умовах пуску, а також при необхідності плавного регулювання частоти обертання.
Двигуни з контактними кільцями іноді застосовують в каскаді з іншими машинами. Каскадні з'єднання асинхронної машини дозволяють плавно регулювати частоту обертання в широкому діапазоні при високому коефіцієнті потужності, однак через значну вартості не мають скільки-небудь помітного поширення.
У двигунах з контактними кільцями вивідні кінці обмотки ротора, фази якої з'єднуються зазвичай в зірку, приєднуються до трьох контактних кілець. За допомогою щіток, що стикаються з кільцями, в ланцюг обмотки ротора можна вводити додатковий опір або додаткову ЕРС для зміни пускових або робочих властивостей машини; щітки дозволяють також замкнути обмотку накоротко.
У більшості випадків додатковий опір вводиться в обмотку ротора тільки при пуску двигуна, що призводить до збільшення пускового моменту і зменшення пускових струмів і полегшує пуск двигуна. При роботі асинхронного двигуна пусковий реостат повинен бути повністю виведений, а обмотка ротора замкнута накоротко. Іноді асинхронні двигуни забезпечуються спеціальним пристроєм, який дозволяє після завершення пуску замкнути між собою контактні кільця і \u200b\u200bпідняти щітки. У таких двигунах вдається підвищити ККД за рахунок виключення втрат від тертя кілець про щітки і електричних втрат в перехідному контакті щіток.
Випускаються заводами асинхронні двигуни призначаються для роботи в певних умовах з певними технічними даними, званими номінальними. До числа номінальних даних асинхронних двигунів, які вказуються в табличці машини, укріпленої на її корпусі, відносяться:
механічна потужність, що розвивається двигуном, Рн \u003d P2н;
частота мережі f1;
лінійна напруга статора U1лн
лінійний струм статора I1лн;
частота обертання ротора n н;
коефіцієнт потужності cos φ1н;
коефіцієнт корисної дії ηн.
Якщо у трифазної обмотки статора виведені початку і кінці фаз і вона може бути включена в зірку або трикутник, то вка-ни опиняються лінійні напруги і струми для кожного з можливих з'єднань (Υ / Δ).
Крім того, для двигуна з контактними кільцями наводиться напруга на розімкнутих кільцях при нерухомому роторі і лінійний струм ротора в номінальному режимі.
Номінальні дані асинхронних двигунів варіюються в дуже широких межах. номінальна потужність - від часток вата до десятків тисяч кіловат. Номінальна синхронна частота обертання п1н \u003d 60 f1 / р при частоті мережі 50 Гц від 3000 до 500 об / хв і менш в особливих випадках; при підвищених частотах - до 100 000 об / хв і більше (номінальна частота обертання ротора зазвичай на 2-5% менше синхронної; в мікродвигуна - на 5-20%). Номінальна напруга від 24 В до 10 кВ ( великі значення при великих потужностях).
Номінальний ККД асинхронних двигунів зростає з ростом їх потужності і частоти обертання; при потужності понад 0,5 кВт він становить 0,65-0,95, в мікродвигуна 0,2-0,65.
Номінальний коефіцієнт потужності асинхронних двигунів, що дорівнює відношенню активної потужності до повної потужності, споживаної з мережі,
також зростає з ростом потужності і частоти обертання двигунів; при потужності понад 1 кВт він становить 0,7-0,9; в мікродвигуна 0,3-0,7.
Загальні відомості про режими роботи асинхронного двигуна.
У руховому режимі різниця частот обертання ротора і поля статора в більшості випадків невелика і складає лише кілька відсотків. Тому частоту обертання ротора оцінюють не в абсолютних одиницях (об / хв або об / с), а у відносних, вводячи поняття ковзання:
s \u003d (пс - п) / пс,
де пс - частота обертання поля (синхронна частота обертання); п - частота обертання ротора.
Ковзання виражається або в відносних одиницях (s \u003d \u003d 0,02; 0,025 і т. П.), Або у відсотках (s - 2%; 2,5% і т. П.).
Частота струму і ЕРС, що наводиться в провідниках обмотки ротора, залежать від частоти струму і ЕРС обмотки статора і від ковзання:
f2 - f1s; Е "2 - E1s,
де Е1 ЕРС обмотки статора; Е "2 - ЕРС обмотки ротора, приведена до числа витків обмотки статора.
Рис. 2.1. Механічна характеристика асинхронної машини
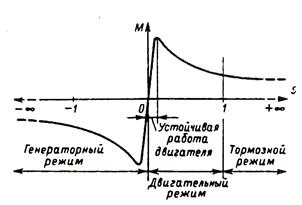
Теоретично асинхронна машина може працювати в діапазоні зміни ковзання s \u003d -∞ ... + ∞ (рис. 2.1), але не при s \u003d 0, так як в цьому випадку п - пс і провідники обмотки ротора нерухомі щодо поля статора, ЕРС і струм в обмотці дорівнюють нулю і момент відсутня. Залежно від практично можливих ковзань розрізняють кілька режимів роботи асинхронних машин (рис. 2.1): генераторний режим при s< 0, двигательный при 0 < s < 1, трансформаторный при s = 1 и тормозной при s > 1. У генераторному режимі ротор машини обертається в ту ж сторону, що і поле статора, але з більшою частотою. У руховому - напрямку обертання поля статора і ротора збігаються, але ротор обертається повільніше поля статора: п \u003d пс (1 - s). У трансформаторному режимі ротор машини нерухомий і обмотки ротора і статора не переміщаються щодо один одного. Асинхронна машина в такому режимі являє собою трансформатор і відрізняється від нього розташуванням первинної та вторинної обмоток (Обмотки статора і ротора) і наявністю повітряного зазору в муздрамтеатрі. В гальмівному режимі ротор обертається, але напрямок його обертання протилежна напрямку поля статора і машина створює момент, протилежний моменту, що діє на вал. Переважна більшість асинхронних машин використовують в якості двигунів, і лише дуже невелика кількість - в генераторному і трансформаторному режимах, в гальмівному режимі - короткочасно.
Для оцінки механічної характеристики асинхронного двигуна моменти, що розвиваються двигуном при різних ковзаннях, зазвичай висловлюють не в абсолютних, а у відносних одиницях, т. Е. Вказують кратність по відношенню до номінального моменту: М * \u003d M / Мном. Залежність М * \u003d f (s) асинхронного двигуна (рис. 2.2) має кілька характерних точок, відповідних пусковому М * п, мінімального М * min, максимальному М * max і номінальному М * ном моментам.
Пусковий момент М * п характеризує початковий момент, що розвивається двигуном безпосередньо при включенні його в мережу при нерухомому роторі (s - 1). Після початку руху двигуна з місця його момент дещо зменшується в порівнянні з пусковим (див. Рис. 2.2). Зазвичай М * min на 10 ... 15% менше М * п. Більшість двигунів проектують так, щоб їх М * min був більше М * ном, так як вони можуть досягти номінальної швидкості лише за умови, що момент опору, прикладений до валу, буде менше, ніж М * min.
Максимальний момент М * max характеризує перевантажувальну здатність двигуна. Якщо момент опору перевищує М * max, двигун зупиняється. Тому М * max називають також критичним, а ковзання, при якому момент досягає максимуму, - критичним ковзанням sкp. Зазвичай sкр не перевищує 0,1 ... 0,15; в двигунах з підвищеним ковзанням (кранових, металургійних і т. п.) sкp може бути значно більшим.
В діапазоні 0< s < sкр характеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > sкр двигун в нормальних умовах працювати не може. Ця частина характеристики визначає пускові властивості двигуна від моменту пуску до виходу на робочу частину характеристики.
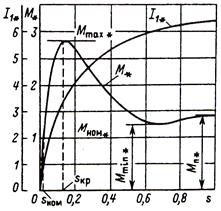
Рис. 2.2. Залежність струму і моменту асинхронного двигуна від ковзання
Трансформаторний режим, т. Е. Режим, коли обмотка статора підключена до мережі, а ротор нерухомий, називають також режимом короткого замикання двигуна. При s \u003d 1 струм двигуна в кілька разів перевищує номінальний, а охолодження багато гірше, ніж при номінальному режимі. Тому в режимі короткого замикання асинхронний двигун, не розрахований для роботи при ковзаннях, близьких до одиниці, може перебувати лише протягом декількох секунд.
Режим короткого замикання виникає при кожному пуску двигуна, однак в цьому випадку він короткочасний. Кілька пусків двигуна з короткозамкненим ротором підряд або через короткі проміжки часу можуть призвести до перевищення допустимої температури його обмоток і до виходу двигуна з ладу.
3. Аналітичне і графічне визначення режимів роботи асинхронної машини
Електромеханічне перетворення енергії може відбуватися в асинхронної машині в наступних трьох режимах:
в режимі двигуна 0< s < l, Ω1 > Ω > 0;
в режимі генератора s< 0, Ω > Ω1;
в режимі гальма s\u003e 1, Ω< 0.
Крім того, важливі ще два характерних режиму роботи, в яких електромеханічне перетворення енергії не відбувається: режим ідеального холостого ходу (s \u003d 0, Ω \u003d Ω1) і режим короткого замикання (s \u003d 1, Ω \u003d 0).
У режимі двигуна (область Д на рис. 3.2) під впливом електромагнітного моменту Μ\u003e 0, спрямованого в сторону поля, ротор машини обертається в бік поля зі швидкістю, меншою, ніж швидкість поля (Ω1\u003e Ω\u003e 0, 0< s < 1). В этом режиме
Ρем \u003d ΜΩ1 \u003d
\u003e 0; Ρмех \u003d ΜΩ \u003d Ρе2\u003e 0.Електрична потужність Р1 \u003d Рем + Рм + Ре1\u003e 0 перетворюється в механічну потужність Р2 \u003d Рмех - Ρд - ΡΊ\u003e 0, передану через вал приводиться в рух машини.
Енергетичні процеси в режимі двигуна ілюструються рис. 3.1, а, на якому напрямок активної складової струму ротора i2а збігається з индуктированной в роторі ЕРС. Напрямок електромагнітного моменту Μ визначається електромагнітної силою Bmi2a, що діє на струм i2a.
Корисна механічна потужність Р2 виявляється менше споживаної з мережі потужності на втрати ΣΡ:
Ρ2 \u003d Ρ1-ΣΡ \u003d Ρ1 - (Ρе1 + Ρм + Ρе2 + Ρд + Ρт),
І ККД двигуна виражається формулою:
\u003d 1 \u003d f (s)У режимі генератора (область Г на рис. 3.2) під впливом зовнішнього моменту Мв\u003e 0, спрямованого в сторону поля (рис. 3.1, б), ротор машини обертається зі швидкістю, що перевищує швидкість поля (Ω\u003e Ω1, s< 0). В этом режиме в связи с изменением направления вращения поля (Ω^) относительно ротора активная составляющая тока ротора г"2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент Μ = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М < 0), мощности Рэ„ и Ртх также отрицательны:
Ρем \u003d ΜΩ1 \u003d
< 0; Ρмех = ΜΩ = Ρэ2 < 0.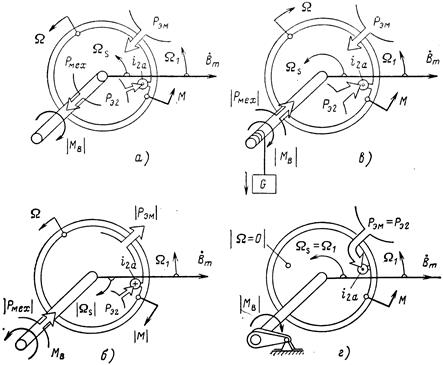
Рис. 3.1. Режими роботи асинхронної машини.
а - руховий;
б - генераторний;
в - гальма;
г - трансформатора (або короткого замикання).
Напрямок перетворення енергії змінюється на протилежне: механічна потужність Рг, підведена до валу машини, перетворюється в електричну потужність Plt надходить в мережу. Оскільки потужність втрат завжди позитивна (в будь-якому режимі роботи ці потужності перетворюються в тепло), механічна потужність:
Ρмех \u003d Ρем - Ρе2< 0 при s < 0
за абсолютним значенням більше, ніж електромагнітна (рис. 3.2):
| Ρмех | \u003d | Ρем | + Ρе2
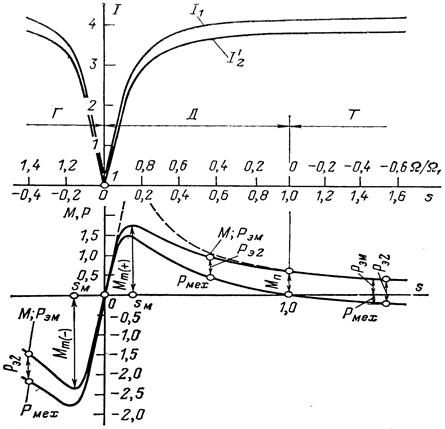
Рис. 3.2. Електромеханічні характеристики асинхронної машини (в відносних одиницях при 1 / х \u003d 1; / 0 \u003d 0,364; cos<р0 = 0,185; Хг = Х"2 = 0,125; Кг = 0,0375; R"s = 0,0425).
З тієї ж причини споживана механічна потужність
P2 \u003d P1 - ΣΡ< 0
за абсолютним значенням на втрати більше електричної потужності, що віддається в мережу:
| Ρ2 | \u003d | Ρ1 | + ΣΡ,
і ККД генератора
= 1-.У режимі гальма (область Т на рис. 3.2) під впливом зовнішнього моменту Мв< 0, направленного против вращения поля (рис. 3.1, в), ротор машины вращается в сторону, противоположную полю (Ω<0, s =
\u003e 1). В цьому режимі електромагнітний момент М, що врівноважує зовнішній момент, як і в режимі двигуна (напрямок обертання поля Ω.5 щодо ротора залишається таким же, як в режимі двигуна), спрямований в бік поля і вважається позитивним (М\u003e 0). Однак, оскільки Ω< 0, механическая мощность оказывается отрицательной:Ρмех \u003d ΜΩ \u003d Ρе2
< 0Це означає, що вона підводиться до асинхронної машині. Електромагнітна потужність в цьому режимі позитивна:
Ρем \u003d ΜΩ1 \u003d
> 0Це означає, що вона надходить з мережі в машину.
Підведені до ротора машини з боку мережі | Ρем | і вала | Ρмех | потужності перетворюються в електричні втрати Ре2 в опорі ротора R "2 (рис. 3.2):
| Ρмех | + | Ρем | \u003d Ρе2
+ Ρе2 \u003d Ρе2 \u003d m1 R "2 (I" 2) 2.Асинхронна машина в цьому режимі може бути використана для пригальмовування опускається підйомним краном вантажу. При цьому потужність | Ρмех | \u003d | ΜΩ | надходить в ротор машини (див. рис. 3.1).
У режимі ідеального холостого ходу зовнішній крутний момент мкВ, момент тертя Μт \u003d Ρт / Ω і момент, пов'язаний з додатковими втратами, Мд \u003d Ρд / Ω дорівнюють нулю. Ротор обертається зі швидкістю поля (Ω \u003d Ω1, s \u003d 0) і не розвиває корисної механічної потужності (М \u003d 0, Рмех \u003d ΜΩ \u003d 0).
У режимі ідеального холостого ходу зовнішній момент, прикладений до валу машини, дорівнює нулю (Мв \u003d 0). Вважається також, що відсутній момент від тертя обертових частин. Ротор машини обертається з тією ж кутовою швидкістю, що і обертається поле (Ω \u003d Ω1), ковзання дорівнює нулю (s \u003d 0); ЕРС і струми в обмотці ротора НЕ индуктируются (I2 \u003d 0), і електромагнітний момент, що врівноважує зовнішній момент і момент сил тертя, дорівнює нулю (М \u003d 0).
Режим холостого ходу асинхронної машини аналогічний режиму холостого ходу трансформатора. У асинхронної машині і в трансформаторі струм в цьому режимі є тільки в первинної обмотці I1 ≠ 0, а у вторинній - відсутній (I2 \u003d 0); в машині і в трансформаторі магнітне поле утворюється в цьому режимі тільки первинним струмом, що дозволяє називати струм холостого ходу намагнічує струмом (I1 \u003d I0). На відміну від трансформатора система струмів I0 в фазах багатофазної обмотки статора утворює обертове магнітне поле. \u003d -. 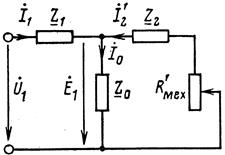
У режимі холостого ходу R "хутро \u003d R" 2
\u003d ∞, ток R "2 \u003d 0 і схема заміщення містить тільки одну гілку Z1 + Z0 (Т-подібна і Г-подібна схеми не відрізняються один від одного).У режимі короткого замикання під дією зовнішнього моменту Μ в, врівноважує електромагнітний момент М, ротор утримується в нерухомому стані (Ω \u003d 0, s \u003d
\u003d 1) і не робить корисною механічної роботи (Рмех \u003d Μ Ω \u003d 0).Напрямок струму i2a і електромагнітного моменту Μ залишається таким же, як в режимі двигуна, і Μ\u003e 0 (див. Рис. 3.1, г). Електромагнітна потужність Рем \u003d ΜΩ1\u003e 0 - вона надходить в ротор з статора і перетворюється в електричні втрати (Рем \u003d \u003d Ре2). В цьому режимі асинхронна машина працює як коротко-замкнутий зі вторинної сторони трансформатор, відрізняючись від нього тільки тим, що в ній існує обертове поле взаємної індукції замість пульсуючого поля в трансформаторі.
У режимі короткого замикання R "хутро \u003d R" 2
\u003d 0 і опір схеми заміщення по рис. 42-3 визначається паралельнопід'єднаних опорами Z1 + Z0 і Z1 + Z "2. Маючи на увазі, що | Z1 + Z" 2 | «| Z1 + Z0 |, можна відкинути гілку Z1 + Z0 і вважати опір схеми заміщення при короткому замиканні рівнимZк \u003d Z1 + Z "2 \u003d Rк + jXк (43-3)
Якщо до нерухомого ротора асинхронної машини підключити симетричну систему додаткових опорів R2д + jХ2д, то вона буде працювати як трансформатор, що перетворює електричну енергію, що надходить з первинної мережі, в електричну енергію з іншими параметрами, споживану додатковими опорами R2д + jХ2д. Тому режим при s \u003d 1 називається також режимом трансформатора.
Змінити режим роботи асинхронної машини або ковзання машини в даному режимі (при U1 \u003d const і f1 \u003d const) можна тільки шляхом зміни зовнішнього моменту Мв, прикладеного до вала машини. При Мв \u003d 0 ротор обертається зі швидкістю поля (Ω \u003d Ω1, s \u003d 0) і машина не робить корисного перетворення енергії. При впливі на вал ротора зовнішнього моменту Мв, спрямованого проти напрямку обертання поля, швидкість ротора зменшується до тих пір, поки не з'явиться електромагнітний момент Μ \u003d f (s), який врівноважить момент Мв. Машина переходить в режим двигуна s \u003d
\u003e 0. Навпаки, при впливі зовнішнього моменту Мв спрямованого по обертанню поля, швидкість ротора робиться більшою, ніж швидкість поля (Ω\u003e Ω1), і машина переходить в режим генератора (s \u003d<0).Нарешті, до режиму гальма можна перейти з режиму двигуна, змінюючи зовнішній момент Мв таким чином, щоб ротор спочатку зупинився, а потім прийшов в обертання в протилежну сторону (по відношенню до поля).
Список літератури
Іванов-Смоленський А. В. Електричні машини: Підручник для вузів. - М .: Енергія, 1980. - 928 с., Іл.
Вольдек А. І. електричні машини. Підручник для студентів вищих навч. Закладів. Л., «Енергія», 1974.
Проектування електричних машин: Учеб. Для вузів / Під ред. І. П. Копилова. М .: Вища. Шк., 2002. - 757 с .: іл.
Винахід відноситься до області прецизійного приладобудування і може бути використано при виробництві та експлуатації інерційних навігаційних систем на електростатичних гіроскопах. Суть винаходу: за результатами змін доглядів ротора гіроскопа на двох частотах обертання ротора при двох положеннях ротора у вакуумній камері визначається номінальна частота обертання ротора, при якій він стає інтегрально сферичним (номінальна частота обертання). Винахід дозволяє зменшити вплив на відходи ротора електростатичного гіроскопа таких факторів, як нестабільність стежать систем підвісу, заряд ротора, похибка стежать систем списування кутового положення, що підвищує точність гіроскопа. 1 мул.
Малюнки до патенту РФ 2269745
Винахід відноситься до області прецизійного приладобудування і може бути використано при виробництві та експлуатації інерційних навігаційних систем на електростатичних гіроскопах (ЕСГ) з тонкостінних ротором, поверхня якого виконана у формі витягнутого до полюсів еліпсоїда.
Відомий спосіб знаходження розрахунковим шляхом величини різниці осей такого еліпсоїда, щоб при обертанні з номінальною частотою форма його поверхні під дією відцентрових сил стала сферичної. Спосіб описаний в статті Ю.Г.Мартиненко і В.В.Подалкова «Асферізація полого ротора електростатичного гіроскопа» (збірник «гіроскоп і навігація», випуск 2, 1997 рік).
Подальша експлуатація гіроскопа проводиться при розрахунковій частоті обертання ротора. Даний спосіб прийнятий як прототип пропонованого винаходу.
Недоліком такого способу є те, що розрахунок не враховує ряд факторів, що впливають на точність визначення частоти обертання ротора, при якій він нечутливий до зміни пондеромоторних сил. До цих факторів слід віднести:
Розкид входять в розрахункові формули параметрів матеріалу ротора (щільності, модуля пружності і ін.);
Поле допусків при виготовленні ротора;
Вплив на точність ЕСГ вищих гармонік форми поверхні ротора.
Всі ці фактори знижують потенційну точність ЕСГ, тому що розбіжність форми поверхні ротора зі сферою призводить до появи моменту від дії пондеромоторних сил, спрямованих по нормалі до поверхні, і, отже, до виникнення доглядів гіроскопа.
Відомо (монографія Ю.Г.Мартиненко «Рух твердого тіла в електричних і магнітних полях», Москва, «Наука», 1998 рік), що при лінійному зміщенні несферичних ротора ЕСГ щодо електродів підвісу змінюється його швидкість догляду внаслідок перерозподілу по поверхні пондеромоторних сил. Якщо при лінійному зміщенні ротора зміни швидкості догляду немає, слід вважати, що ЕСГ інваріантний до зміни пондеромоторних сил, тобто ротор такого ЕСГ інтегрально сферичний.
Завданням цього винаходу є визначення частоти обертання ротора, при якій він стає інтегрально сферичним (номінальної частоти обертання), що зменшує ведуть моменти від пондеромоторних сил, а отже, підвищує точність гіроскопа.
Поставлена \u200b\u200bзадача вирішується послідовністю операцій:
1. ЕСГ встановлюють в прилад, що дозволяє визначати швидкість догляду ротора (наприклад, в гірооріентатор), так, щоб вісь обертання ротора перебувала в площині Земної екватора.
2. Ротор зважують у вакуумній камері за допомогою просторової системи підвісу і розганяють до розрахункової частоти обертання f 1.
3. Прилад, в який встановлений ЕСГ, призводять в робочий режим.
4. Визначають швидкість догляду ротора n 11 по накопиченому кутку вплоскості Земної екватора.
5. зміщується ротор у вакуумній камері уздовж осі, розташованої по осі обертання ротора, шляхом введення додаткової електричної напруги на вхід системи, що стежить координати підвісу по цій осі.
6. Визначають швидкість догляду ротора n 12.
7. Розганяють ротор до частоти обертання f 2.
8. Визначають швидкість догляду ротора n 21.
9. Знімають додаткове електричну напругу.
10. Визначають швидкість догляду ротора n 22.
11. Обчислюють номінальну частоту обертання ротора, при якій він стає інтегрально сферичним, за формулою:
12. Доводять частоту обертання ротора до номінальної.
Висновок формули пояснюється кресленням, де позначено:
f 1 - розрахункова частота обертання ротора;
f 2 - частота обертання ротора після розгону (гальмування);
f н - частота обертання ротора, при якій він стає інтегрально сферична;
A, B, C, D, E - вершини трикутників;
(N 12 -n 11) - різниця швидкостей догляду ротора після і до лінійного зсуву на частоті обертання ротора f 1;
(N 22 -n 21) - різниця швидкостей догляду ротора після і до лінійного зсуву на частоті обертання ротора f 2.
З подоби трикутників ABD і АСЕ:
Вирішуючи цю пропорцію, отримаємо вищенаведену формулу.
На підприємстві ЦНДІ «Електроприлад» пропоноване технічне рішення здійснено.
ЕСГ встановлюється в двовісний гіростабілізатори, ротор ЕСГ зважується у вакуумній камері з допомогою тривісною стежить системи, розкручується до розрахункової частоти обертання (f 1), яка визначається конструкторською документацією, за допомогою демпфирующей котушки вісь ротора виставляється в площину Земної екватора. Потім включаються стежать карданових кілець, спостерігається рух ротора і визначається по накопиченому кутку швидкість виходу на розрахунковій частоті обертання (n 11). Далі ротор зміщується вздовж осі обертання, за допомогою додаткового електричної напруги, що вводиться в координату стежить системи підвісу ротора, що управляє його лінійним переміщенням уздовж осі обертання, і знову визначається швидкість виходу на розрахунковій частоті обертання (n 12).
Наступною операцією ротор розганяється до частоти обертання вище розрахункової (f 2), проводиться вимірювання швидкості догляду ротора (n 21) на частоті вище розрахункової, після чого додаткове електрична напруга знімається і знову визначається швидкість догляду ротора (n 22).
За формулою (1) знаходиться номінальна частота обертання ротора (f н) і частота обертання ротора доводиться до номінальної (f н).
Реалізація цього способу в ЦНДІ "Електроприлад" дозволила підвищити точність ЕСГ в 3-5 разів.
Техніко-економічна ефективність винаходу полягає в підвищенні точності ЕСГ.
У зв'язку з відсутністю відомостей про потреби країни в кількості таких гіроскопів економічний ефект винаходу підрахувати неможливо.
ФОРМУЛА ВИНАХОДУ
Спосіб визначення номінальної частоти обертання ротора електростатичного гіроскопа, що містить тонкостінний ротор, зовнішня поверхня якого виконана у формі витягнутого до полюсів еліпсоїда обертання з певною розрахунковим шляхом величиною різниці осей еліпсоїда, що полягає в тому, що електростатичний гіроскоп встановлюють в прилад, що дозволяє визначати швидкість догляду ротора, вісь обертання ротора виставляють в площину Земної екватора, ротор зважують у вакуумній камері за допомогою просторової системи, що стежить підвісу, здійснюють розгін ротора до розрахункової частоти обертання f 1, після приведення приладу, в якому встановлений гіроскоп, в робочий режим визначають швидкість догляду n 11 по накопиченому розі в площині Земної екватора, що відрізняється тим, що ротор зміщують у напрямку осі обертання шляхом введення додаткової електричної напруги на вхід системи, що стежить координати підвісу, розташованої уздовж осі обертання ротора, вимірюють швидкість догляду ротора n 12, розганяють ротор до частоти обертання f 2, вимірюють швидкість догляду n 21, знімають додаткове електрична напруга, вимірюють швидкість догляду ротора n 22, визначають номінальну частоту обертання ротора за формулою
і доводять частоту обертання ротора до номінальної.