Механічні характеристики електродвигунів і виробничих механізмів. Характеристики двигунів змішаного збудження
Класифікація механічних характеристик.
Мал. 1-1. структура електроприводу
електроприводом називається машинне пристрій, що здійснює перетворення електричної енергії в механічну і забезпечує електричне управління реформованій механічної енергією.
Електропривод складається з двох основних частин:
1) силовий частини, що включає електродвигун і пристрій для передачі механічної енергії робочого органу;
2) системи управління, що містить командні органи, пристрої для формування властивостей електроприводу і захисні засоби.
Основна функція електроприводу - приводити в рух робочий механізм. Однак сучасний автоматизований електропривод виконує ширші функції по оптимізації технологічного процесу.
Електроприводи, що застосовуються у виробництві, можна розділити на три основні типи.
1)  Груповим електроприводом називається такий привід, в якому від одного електродвигуна за допомогою однієї або декількох трансмісій рух передається групі робочих машин. Такий привід іноді називають трансмісійним приводом.
Груповим електроприводом називається такий привід, в якому від одного електродвигуна за допомогою однієї або декількох трансмісій рух передається групі робочих машин. Такий привід іноді називають трансмісійним приводом.
Внаслідок свого технічну недосконалість цей тип приводу в даний час майже не застосовується і представляє інтерес лише з точки зору історії розвитку електроприводу, так як він поступився місцем одиночному і багатодвигунових.
2) 
 Одиночним електроприводом називається привід, який за допомогою одного електродвигуна приводить в рух окрему машину. Прикладами застосування одиночного електроприводу є одношпіндельний свердлильний верстат, численні електроінструменти, а також інші прості металообробні верстати і різні нескладні механізми. У багатьох випадках привід здійснюється від електродвигуна спеціального виконання, конструктивно представляє одне ціле з самим механізмом.
Одиночним електроприводом називається привід, який за допомогою одного електродвигуна приводить в рух окрему машину. Прикладами застосування одиночного електроприводу є одношпіндельний свердлильний верстат, численні електроінструменти, а також інші прості металообробні верстати і різні нескладні механізми. У багатьох випадках привід здійснюється від електродвигуна спеціального виконання, конструктивно представляє одне ціле з самим механізмом.
3) многодвигательном електроприводом називається привід, що складається з декількох одиночних електроприводів, кожен з яких призначений для приведення в дію окремих робочих елементів виробничого агрегату. Такі електроприводи застосовуються, наприклад, в складних металообробних верстатах, на машинах з виробництва, в металургійних прокатних станах та інших машинних пристроях. Багатодвигунні електроприводи отримують все більше застосування в сучасній промисловості.
Залежність між швидкістю обертання і моментом опору механізму називається механічною характеристикою механізму.
Для розгляду властивостей механічних характеристик можна скористатися спрощеною формулою, справедливою для більшості механізмів:
Виходячи з цієї формули можна виділити чотири типи механічних характеристик:
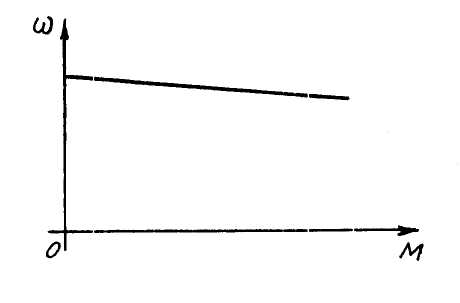
1) не залежить від швидкості механічна характеристика
![]() ,
,
2) лінійно зростаюча механічна характеристика
3) нелінійно зростаюча характеристика (параболічна)
Вентиляторна характеристика,
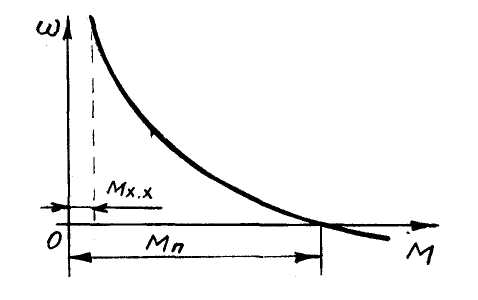
4) нелінійно спадає характеристика
Обернено пропорційний швидкості.
Мал. 1-4. Основні типи механічних характеристик.
Механічною характеристикою електродвигуна називається залежність його швидкості від крутного моменту, т. Е. .
 Майже всі електродвигуни володіють тією властивістю, що швидкість їх є спадною функцією моменту двигуна. Це відноситься майже до всіх звичайним електродвигунів, що застосовуються в промисловості. Однак ступінь зміни швидкості зі зміною моменту у різних двигунів різна і характеризується так званої жорсткістюїх механічних характеристик.
Майже всі електродвигуни володіють тією властивістю, що швидкість їх є спадною функцією моменту двигуна. Це відноситься майже до всіх звичайним електродвигунів, що застосовуються в промисловості. Однак ступінь зміни швидкості зі зміною моменту у різних двигунів різна і характеризується так званої жорсткістюїх механічних характеристик.
Механічні характеристики електродвигунів можна розділити на три основні категорії:
1. Абсолютно жорстка механічна характеристика, при якій швидкість зі зміною моменту залишається незмінною. Такий характеристикою володіють синхронні двигуни (пряма 1 на рис. 1-5).
 2. Жорстка механічна характеристика, при якій швидкість зі зміною моменту хоча і зменшується, але в малому ступені. Жорсткої механічною характеристикою володіють двигуни постійного струму незалежного збудження, а також асинхронні двигуни в межах робочої частини механічної характеристики (крива 2
на рис. 1-5). Для асинхронного двигуна ступінь жорсткості в різних точках механічної характеристики різна (рис. 1-6). Між найбільшими (критичними) значеннями моментів в руховому і генераторному режимах характеристика асинхронного двигуна виявляється порівняно жорсткою.
2. Жорстка механічна характеристика, при якій швидкість зі зміною моменту хоча і зменшується, але в малому ступені. Жорсткої механічною характеристикою володіють двигуни постійного струму незалежного збудження, а також асинхронні двигуни в межах робочої частини механічної характеристики (крива 2
на рис. 1-5). Для асинхронного двигуна ступінь жорсткості в різних точках механічної характеристики різна (рис. 1-6). Між найбільшими (критичними) значеннями моментів в руховому і генераторному режимах характеристика асинхронного двигуна виявляється порівняно жорсткою.
 3. М'яка механічна характеристика відрізняється значною зміною швидкості зі зміною моменту. Такий характеристикою володіють двигуни послідовного збудження, особливо в зоні малих моментів (крива 3
на рис. 1-5). Для цих двигунів ступінь жорсткості не залишається постійною для всіх точок характеристики. Двигуни змішаного збудження можуть бути віднесені до другої або третьої групи в залежності від ступеня жорсткості механічної характеристики.
3. М'яка механічна характеристика відрізняється значною зміною швидкості зі зміною моменту. Такий характеристикою володіють двигуни послідовного збудження, особливо в зоні малих моментів (крива 3
на рис. 1-5). Для цих двигунів ступінь жорсткості не залишається постійною для всіх точок характеристики. Двигуни змішаного збудження можуть бути віднесені до другої або третьої групи в залежності від ступеня жорсткості механічної характеристики.
Мал. 1-7. Схема включення двигуна постійного струму
незалежного збудження.
У сталому режимі роботи двигуна прикладена напруга U визначається подальшого висловом:
![]() (1.1)
(1.1)
де I я - струм якірного ланцюга, називається така характеристика двигуна, яка виходить при відсутності зовнішніх опорів в якірного ланцюга і номінальних значеннях напруги і магнітного потоку.
Якщо в ланцюг якоря двигуна включено додатковий опір (реостат), то механічні характеристики, одержувані при цьому, називаються штучними або реостатними.
Реостатні характеристики мають значно більший нахил до осі моментів, ніж у природної характеристики, тобто мають меншу жорсткістю. Чим більше введене в ланцюг якоря опір, тим крутіше йде характеристика, тим менше її жорсткість.
38) механічна характеристика асинхронного двигуна.
механічна характеристика. Залежність частоти обертання ротора від навантаження (обертового моменту на валу) називається механічною характеристикою асинхронного двигуна (рис. 262, а). При номінальному навантаженні частота обертання для різних двигунів зазвичай становить 98-92,5% частоти обертання n 1 (ковзання s ном \u003d 2 - 7,5%). Чим більше навантаження, т. Е. Крутний момент, який повинен розвивати двигун, тим менше частота обертання ротора. Як показує крива
Мал. 262. Механічні характеристики асинхронного двигуна: а - природна; б - при включенні пускового реостата
на рис. 262, а, частота обертання асинхронного двигуна лише незначно знижується при збільшенні навантаження в діапазоні від нуля до найбільшого її значення. Тому кажуть, що такий двигун має тверду механічною характеристикою.
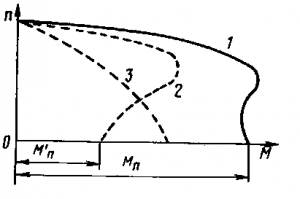
Максимальний крутний момент M max двигун розвиває при деякий ковзанні s kp, що становить 10-20%. Ставлення M max / M ном визначає перевантажувальну здатність двигуна, а відношення М п / М ном - його пускові властивості.
Двигун може стійко працювати тільки при забезпеченні саморегулювання, т. Е. Автоматичному встановленні рівноваги між прикладеним до валу моментом навантаження М вн і моментом М, що розвивається двигуном. Цій умові відповідає верхня частина характеристики до досягнення M max (до точки В). Якщо навантажувальний момент М вн перевищить момент M max, то двигун втрачає стійкість і зупиняється, при цьому по обмоткам машини буде довго проходити струм в 5-7 разів більше номінального, і вони можуть згоріти.
При включенні в ланцюг обмоток ротора пускового реостата отримуємо сімейство механічних характеристик (рис. 262, б). Характеристика 1 при роботі двигуна без пускового реостата називається природною. Характеристики 2, 3 і 4, одержувані при підключенні до обмотці ротора двигуна реостата з опорами R 1п (крива 2), R 2п (крива 3) і R 3п (крива 4), називають реостатними механічними характеристиками. При включенні пускового реостата механічна характеристика стає більш м'якою (більш крутопадающей), так як збільшується активний опір ланцюга ротора R 2 і зростає s Кp. При цьому зменшується пусковий струм. Пусковий момент М п також залежить від R 2. Можна так підібрати опір реостата, щоб пусковий момент М п дорівнював найбільшому М max.
У двигуні з підвищеним пусковим моментом природна механічна характеристика наближається за своєю формою до характеристики двигуна з включеним пусковим реостатом. Момент, що обертає двигуна з подвійною білячою кліткою дорівнює сумі двох моментів, створюваних робочої і пускової клітинами. Тому характеристику 1 (рис. 263) можна отримати шляхом підсумовування характеристик 2 і 3, що створюються цими клітинами. Пусковий момент М п такого двигуна значно більше, ніж момент М 'п звичайного короткозамкнутого двигуна. Механічна характеристика двигуна з глибокими пазами така ж, як і у двигуна з подвійною білячою кліткою.
ВСЯК ВИПАДОК РОБОЧУ ХАРАКТЕРИСТИКУ !!!
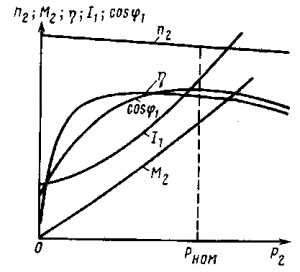
Робочі характеристики.Робочими характеристиками асинхронного двигуна називаються залежності частоти обертання n (або ковзання s), моменту на валу М 2, струму статора I 1 коефіцієнта корисної дії? і cos? 1, від корисної потужності Р 2 \u003d Р mx при номінальних значеннях напруги U 1 і частоти f 1 (рис. 264). Вони будуються тільки для зони практичної стійкої роботи двигуна, т. Е. Від ковзання, рівного нулю, до ковзання, що перевищує номінальну на 10-20%. Частота обертання n з ростом віддається потужності Р 2 змінюється мало, так само як і в механічної характеристиці; крутний момент на валу М 2 пропорційний потужності Р 2, він менше електромагнітного моменту М на значення гальмуючого моменту М тр, створюваного силами тертя.
Струм статора I 1, зростає зі збільшенням потужності, що віддається, але при Р 2 \u003d 0 є деякий струм холостого ходу I 0. К. п. Д. Змінюється приблизно так само, як і в трансформаторі, зберігаючи досить велике значення в порівняно широкому діапазоні навантаження.
Найбільше значення к. П. Д. Для асинхронних двигунів середньої і великої потужності становить 0,75-0,95 (машини великої потужності мають відповідно більший к. п. д.). Коефіцієнт потужності cos? 1 асинхронних двигунів середньої і великої потужності при повному навантаженні дорівнює 0,7-0,9. Отже, вони завантажують електричні станції та мережі значними реактивними струмами (від 70 до 40% номінального струму), що є істотним недоліком цих двигунів.
 Мал. 263. Механічна характеристика асинхронного двигуна з підвищеним пусковим моментом (з подвійною білячою кліткою)
Мал. 263. Механічна характеристика асинхронного двигуна з підвищеним пусковим моментом (з подвійною білячою кліткою)
 Мал. 264. Робочі характеристики асинхронного двигуна
Мал. 264. Робочі характеристики асинхронного двигуна
При навантаженнях 25-50% від номінальної, які часто зустрічаються при експлуатації різних механізмів, коефіцієнт потужності зменшується до незадовільних з енергетичної точки зору значень (0,5-0,75).
При знятті навантаження з двигуна коефіцієнт потужності зменшується до значень 0,25-0,3, тому не можна допускати роботу асинхронних двигунів при холостому ході і значних недогрузках.
Робота при зниженій напрузі і обриві однієї з фаз. Зниження напруги мережі не робить істотного впливу на частоту обертання ротора асинхронного двигуна. Однак в цьому випадку сильно зменшується максимальний обертовий момент, який може розвинути асинхронний двигун (при зниженні напруги на 30% він зменшується приблизно в 2 рази). Тому при значному падінні напруги двигун може зупинитися, а при низькій напрузі - не включити в роботу.
На е. п. с. змінного струму при зменшенні напруги в контактної мережі відповідно зменшується і напруга в трифазній мережі, від якої живляться асинхронні двигуни, що призводять в обертання допоміжні машини (вентилятори, компресори, насоси). Для того щоб забезпечити нормальну роботу асинхронних двигунів при зниженій напрузі (вони повинні нормально працювати при зменшенні напруги до 0,75U ном), потужність всіх двигунів допоміжних машин на е. п. с. береться приблизно в 1,5-1,6 рази більшою, ніж це необхідно для приводу їх при номінальній напрузі. Такий запас по потужності необхідний також через деяку несиметрії фазних напруг, так як на е. п. с. асинхронні двигуни харчуються не від трифазного генератора, а від расщепителя фаз. При несиметрії напруг фазні струми двигуна будуть неоднакові і зрушення між ними по фазі нічого очікувати дорівнює 120 °. В результаті по одній з фаз буде протікати більший струм, який викликає збільшений нагрів обмоток даної фази. Це змушує обмежувати навантаження двигуна в порівнянні з роботою його при симетричному напрузі. Крім того, при несиметрії напруг виникає не круговий, а еліптичне обертове магнітне поле і дещо змінюється форма механічної характеристики двигуна. При цьому зменшуються його найбільший і пусковий моменти. Несиметрію напруг характеризують коефіцієнтом несиметрії, який дорівнює середньому відносного (у відсотках) відхилення напруг в окремих фазах від середнього (симетричного) напруги. Систему трифазних напруг прийнято вважати практично симетричною, якщо цей коефіцієнт менше 5%.
При обриві однієї з фаз двигун продовжує працювати, але по неушкодженим фазами будуть протікати підвищені струми, що викликають збільшений нагрів обмоток; такий режим не повинен допускатися. Пуск двигуна з обірваної фазою неможливий, так як при цьому не створюється обертове магнітне поле, внаслідок чого ротор двигуна не буде обертатися.
Використання асинхронних двигунів для приводу допоміжних машин е. п. с. забезпечує значні переваги в порівнянні з двигунами постійного струму. При зменшенні напруги в контактній мережі частота обертання асинхронних двигунів, а отже, і подача компресорів, вентиляторів, насосів практично не змінюються. У двигунах ж постійного струму частота обертання пропорційна живлячої напруги, тому подача цих машин істотно зменшується.
ТЕМА ЛЕКЦІЇ 10
Механічні характеристики електродвигунів
ПЛАН ЛЕКЦІЇ
1. Природні і штучнімеханічні характеристикиелектродвигунів
- жорсткість механічних характеристик
- Природна механічна характеристика двигуна постійного струму паралельного збудження
- Природна механічна характеристика
- природна
- Механічна характеристика синхронного двигуна. Область застосування синхронних двигунів на судах
Механічною характеристикою двигуна, незалежно від роду струму, називають залежність кутової швидкості вала електродвигуна ω (далі двигуна) від електромагнітного моменту двигуна, тобто залежність ω ().
Тут слід зробити важливе зауваження: відповідно до рівняння моментів, в сталому режимі \u003d, електромагнітний момент двигуна врівноважується статичним моментом (момент ом опору) механізму. Це означає, що величина електромагнітного моменту двигуна повністю залежить від моменту механізмучим більше гальмівний момент механізму, тим більше, що обертає момент двигуна, і навпаки.
Тобто, для будь-якого двигуна вхідний величиною є момент механізму, а вихідниййого швидкість.
Швидкість майже всіх електродвигунів є спадною функцією моменту двигуна, тобто зі збільшенням моменту швидкість зменшується [чіл 33]. Але ступінь зміни швидкості у різних електродвигунів різна і характерезуется параметром жорсткість механічні характеристик.
жорсткість механічні характеристик електроприводу β це відношення різниці електромагнітних моментів двигуна при різних швидкостях до відповідне різниці кутових швидкостей електроприводу.
β \u003d (М 2 М 1) / (ω2 ω1) \u003d Δ / Δω
Зазвичай на робочих ділянках механічні характерістікіелектродвігателей мають негативну жорсткість β< 0, так как(ω2 < ω1 ,
М 1< М 2 ) при большей скорости электромагнитный момент меньше.
розрізняють природні та штучнімеханічні характеристикі електродвигунів.
Природна механічна характеристика це залежність ω (), знята при нормальних умовах роботи двигуна, тобто при номінальних параметрах живильної мережі і відсутності додаткових резисторівв ланцюгах обмоток двигунів.
До параметрів мережі живлення відносяться: при постійному струмі напруга, при змінному струмі напруга і частота струму.
Характеристики, зняті за умов, відмінних від нормальних, Називають штучними.
Штучні характеристики можна отримати шляхом зміни параметрів двигуна, наприклад, шляхом введення резисторів в ланцюг обмотки якоря двигуна постійного струму або в ланцюг обмотки ротора асинхронного двигуна, або зміною параметрів мережі живлення, тобто напруги і частоти змінного струму.
Кожен електродвигун має одну природну і безліч штучних характеристик. Число штучних характеристик залежить від числа ступенів регулюючого елемента, наприклад, числа ступенів регулювального реостата в ланцюзі обмотки якоря двигуна постійного струму. Якщо у двигуна таких ступенів п'ять, то такий двигун має шість характеристик п'ять штучних і одну природну.
Штучні механічні характеристики застосовуються для отримання таких режимів роботи двигуна, як регулювання швидкості, реверс, електричне гальмування, і ін.
Розглянемо природноперші механічні характеристики двигуніврізних типів.
Мал. 10.1 Природна механічна (а) і кутова (б) характеристики синхронного двигуна; θ кут відставання осі ротора від осі магнітного поля обмотки статора
Природна механічна характеристика синхронного двигуна
природна механічнахарактеристика синхронного двигуна(Рис. 10.1а) абсолютно жорсткаце характеристика при якійшвидкість зі зміною моменту не змінюється, Її жорсткість (β \u003d ∞)
β = Δ / Δω = Δ / 0 = ∞.
C табільность швидкості ротора синхронного двигуна пояснюється кутовий характеристики синхронного двигуна θ () наступним чином (рис. 10.1 б), якщо механічне навантаження до ротора не прикладено силу, то осі ротора і магнітного поля обмотки статора збігаються, тобто θ \u003d 0 ° (точка 0 на рис.10.1 б). Якщо електромагнітний момент двигуна М \u003d 0, двигун працює в режимі холостого ходу.
Якщо прикласти до валу двигуна механічне навантаження і збільшувати її, то ротор під дією механічного навантаження стане відставати від магнітного поля обмотки статора на все більший кут θ.
Чим більше механічне навантаження на валу, тим більше цей кут і тим більше, що обертає електромагнітний момент двигуна.
таке одночасне збільшення крутного моменту двигуна, викликається збільшенням гальмівного моменту механізму як раз і забезпечує стабільність швидкості двигуна (На рис. 10.1 а ділянку характеристики від \u003d 0 до \u003d).
Однак сталість швидкості двигуна зберігається до тих пір, поки кут θ≤90 °. При θ \u003d 90 ° двигун розвиває критичний (максимальний) момент (точка А на рис. 10.1 а).
Якщо при θ \u003d 90 ° знову збільшити механічну навантаження (θ\u003e 90 °), електромагнітний момент двигуна стане зменшуватися (відрізок АВ кутовий характеристики), тобто цей момент виявиться менше гальмівного моменту механізму. В результаті швидкість ротора двигуна стане зменшуватися, і в кінці кінців ротор зупиниться.
Оскільки при цьому швидкість ротора менше швидкості обертового магнітного поля обмотки статора, кажуть, що двигун випав із синхронізму.
Як випливає з кутовий характеристики двигуна, умова випадання двигуна із синхронізму таке: θ≤90 °.
На практиці номінальний кут θ \u003d 20 ... 40 °.
Область застосування синхронних двигунів: на судах в якості гребних електродвигунів, що обертають гвинти; на березі для приводу потужних механізмів, наприклад, компресорів на газоперекачувальних станціях.
Природна механічна характеристика двигуна постійного струму
природна механічна характеристика двигуна постійного струмупаралельного збудження (рис. 8.5)ж е стка, тому що її жорсткість
β \u003d Δ / Δω ≤ 10%.
Мал. 10.2 Природна механічна характеристика двигуна постійного струму паралельного збудження
Це означає, що при зміні електромагнітного моменту двигуна в широких межах його швидкість досить стабільна (тобто змінюється незначно).
Такі двигуни застосовуються там, де при зміні навантаження механізму в широких межах швидкість двигуна не повинна змінюватися різко в електроприводах насосів, вентиляторів і т.п.
Мал. 10.3 Природна механічна характеристикадвигуна постійного струму послідовного збудження
природна механічна характеристика двигуна постійного струму послідовного збудження (рис. 10.3) м'яка , Тому що її жорсткість
β \u003d Δ / Δω\u003e 10%.
Це означає, що при зміні електромагнітного моменту двигуна навіть в невеликих межах його швидкість змінюється значно.
Нагадаємо дві характерні особливості цього двигуна двигуна постійного струму послідовного збудження:
- П ри зменшенні механічної навантаження на валу або її відсутності (\u003d)
швидкість двигуна різко збільшується, двигун «йде в рознос». Тому цей двигун не можна залишати без навантаження на валу;
- При пуску двигун розвиває пускові моменти більше, ніж у двигунів інших типів.
Ці двигуни не застосовуються на судах, але застосовуються на березі, наприклад, в електротранспорті, зокрема, в тролейбусах, де вони не залишаються без навантаження на валу і де потрібні великі пускові моменти (при рушанні тролейбуса з місця).
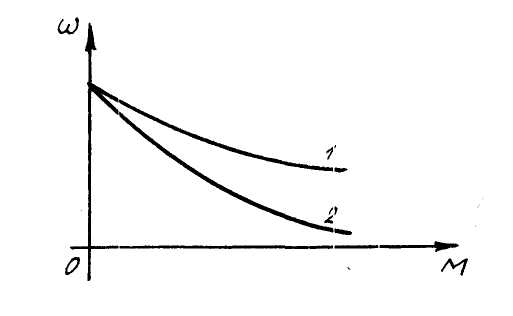
Мал. 10.4 Природні механічні характеристики двигунів постійного струму змішаного збудження: 1 з паралельно-послідовним збудженням;
2 - з послідовно паралельним збудженням
природна механічна характеристика двигуна постійного струму змішаного збудження проміжна між характеристиками двигунів паралельного і послідовного збудження, тому що магнітний потік збудження створюється спільною дією обох обмоток паралельної і послідовної.
Розрізняють два види двигунів змішаного збудження:
- з паралельно послідовним збудженням, у яких основну частину результуючого магнітного потоку створює паралельна обмотка (до 70%, решта 30% послідовна);
2. з послідовно паралельним збудженням, у яких основну частину результуючого магнітного потоку створює послідовна обмотка (до 70%, решта 30%паралельна).
Тому графік механічної характеристики двигуна першого виду жорсткіший, ніж у двигуна другого виду.
Обидві механічні характеристиким'які , Тому що їх жорсткість
β \u003d Δ / Δω\u003e 10%.
На судах двигуни змішаного збудження застосовуються в регульованих електроприводах лебідках, кранах, брашпиля і шпилях.
Природна механічна характеристика асинхронного двигуна
природна механічна характеристика асинхронного двигуна має дві ділянки неробочий (розгінний) АВ і робочий ВСD (рис. 8.8).
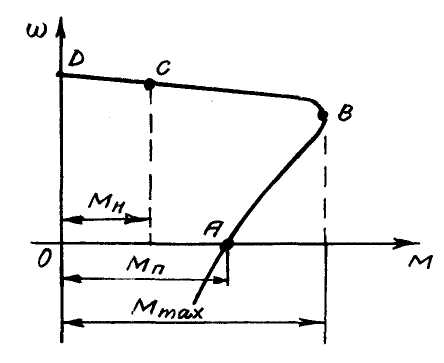
Мал. 10.5 Природна механічна характеристика асинхронного двигуна
При пуску двигун розвиває пусковий момент(Відрізок ОА), після чого розганяється по траєкторії АВС до точки С. При цьому на ділянці АВ одночасно збільшуються як швидкість, так і момент, в точці В двигун розвиває максимальний момент. На ділянці ВС швидкість продовжує збільшуватися, а момент зменшується, до номінального (точка С). На ділянціBC двигун перевантажений, Тому що в будь-якій точці цієї ділянки електромагнітний момент двигуна більше номінального (> >).
У нормальних умовах двигун працює на ділянці СD , Жорсткість якого
β = Δ / Δω < 10%.
Це означає, що при зміні моменту в широких межах швидкість двигуна змінюється незначно.
Асинхронні двигуни знайшли найширше застосування на судах з електростанцією на змінному струмі.
Промисловість випускає спеціально для судів асинхронні двигуни різних серій, наприклад, 4А ... ОМ2 (четверта серія асинхронних двигунів), МАП (морської асинхронний полюсопереключаемий), МТF (c фазним ротором) та ін.
При цьому двигуни серії 4А одношвидкісні, серії МАП дво- і тришвидкісні, серії МТF число швидкостей визначається схемою управління (до 5 швидкостей).
Лекція 7.
2.5. Механічні характеристики двигуна постійного струму з послідовним збудженням. руховий режим
Схема включення двигуна наведена на рис. 2.8. Якір двигуна М і обмотка збудження LM включені послідовно і отримують живлення від одного джерела U. Тому струм якоря I я є і струмом збудження I в . Ця обставина визначає єдина відмінність в конструкції двигуна з послідовним збудженням від двигуна з незалежним збудженням: Обмотка збудження LM ДПТ з послідовним збудженням виконана провідником того ж перетину, що і обмотка якоря.
Мал. 2.8. Схема включення ДПТ з послідовним збудженням.
При обертовому якорі в його обмотці наводиться е.р.с. обертання ^ Е. На схемі включення двигуна напрямок Е зустрічно по відношенню напрямки U, Що відповідає руховому режиму роботи. величина Е дорівнює:
де ?
- кутова швидкість двигуна; Ф - потік двигуна;  - конструктивний коефіцієнт двигуна дані для розрахунку, якого наводяться в довідниках. тут р - число пар полюсів двигуна; N - число активних провідників обмотки якоря; а - число пар паралельних гілок обмотки якоря.
- конструктивний коефіцієнт двигуна дані для розрахунку, якого наводяться в довідниках. тут р - число пар полюсів двигуна; N - число активних провідників обмотки якоря; а - число пар паралельних гілок обмотки якоря.
Напрямок якірного струму I Я , Як і напрямок Е на схемі включення показано для рухового режиму роботи.
Допустиме значення якірного струму двигуна I я доп обмежується умовами комутації і механічною міцністю якоря і не повинно перевищувати номінальний струм I ян більш ніж в 2,5 рази I я доп ? 2,5 I ян .
Відповідно до рівняння рівноваги напруг при сталому режимі роботи двигуна напруга U, прикладена до якірного ланцюга двигуна врівноважується падінням напруги в якірного ланцюга I я R яц і наведеної в обмотці якоря е.р.с. обертання Е:
U \u003d I Я R ЯЦ + Е
де R ЯЦ \u003d R Я + R ДП + R КО + R В + R П - сумарний опір якірного ланцюга. тут R Я - опір обмотки якоря; R ДП - опір обмотки додаткових полюсів; R КО - опір компенсаційної обмотки; R В - опір обмотки збудження; R П - опір пускового реостата.
величина I Я в сталому режимі буде дорівнює:
У режимі пуску ^ Е \u003d 0, Тому через невеликого опору обмоток пусковий струм I Я П може перевищувати допустиме значення. Для обмеження пускового струму служить пусковий реостат, опір якого R П вибирається таким чином, щоб I Я П ? I Я ДОП
З рівняння рівноваги напруг для якірного ланцюга можна отримати аналітичний вираз для механічної характеристики двигуна.
Підставивши в нього замість е.р.с. обертання ^ Е її значення і вирішивши отримане рівняння щодо швидкості, отримаємо залежність швидкості двигуна ? від струму якоря I Я ? \u003d F (I Я ) , Яка називається електромеханічної характеристикою:
Оскільки обмотка збудження включена послідовно з якорем двигуна, створюваний нею магнітний потік ^ Ф є функцією струму якоря I Я . залежність Ф \u003d f (I Я ) називається кривою намагнічування і носить нелінійний характер типу «зона насичення». Точного аналітичного опису цієї кривої не існує, тому немає і точного аналітичного опису механічної характеристики ДПТ з послідовним збудженням. Якщо, нехтуючи насиченням магнітної системи, припустити лінійну залежність між Ф і I Я з коефіцієнтом пропорційності ?, тобто вважати Ф \u003d? I Я , То обертаючий момент буде дорівнює:
М \u003d kФI Я \u003d k? I Я 2
Звідси величина струму якоря буде дорівнює:
Підставивши в рівняння електромеханічної характеристики значення для I я , Отримаємо рівняння механічної характеристики:
де А \u003d U / k ?; В \u003d R ЯЦ / (K?) - постійні величини.
Аналіз отриманого рівняння показує, що вісь ординат є асимптотой для кривої і що в області малих значень моментів вона має велику крутизну
при R П =0 і U \u003d U н двигун працює на природній характеристиці. Для побудови природної характеристики використовуються так звані універсальні характеристики, наведені в каталогах для кожної серії двигунів. Вони представляють залежності n \u003d f (I Я ) і М \u003d f (I Я ) в відносних одиницях. Знаючи номінальні дані двигуна, можна побудувати його характеристику в абсолютних величинах. Така характеристика приведена на рис. 2.9.
Мал. 2.9. Механічні характеристики двигуна постійного струму послідовного збудження.
Особливістю характеристики є різке збільшення швидкості при зменшенні моменту опору М з . З цього двигун постійного струму з послідовним збудженням не можна запускати в тих випадках, коли М з н , Так як швидкість двигуна може перевищувати допустиме значення ?
доп =2,5 ?
н . Пояснити цю особливість можна, розглянувши процеси, що протікають в двигуні при зменшенні навантаження. Припустимо, що двигун працював в точці А на природній характеристиці (див. Рис. 2.9.) В сталому режимі зі швидкістю ?
1
. При зменшенні моменту опору від величини М з 1 наприклад, до величини М с2 , З'являється позитивний динамічний момент М Д >0
і швидкість двигуна починає збільшуватися. При незалежному збудженні наслідком цього буде збільшення е.р.с. обертання  і зменшення струму якоря
і зменшення струму якоря  і крутного моменту
і крутного моменту  . Збільшення швидкості і зменшення моменту двигуна триватиме до тих пір, поки момент двигуна М на стане рівним М с2 і М Д стане рівним нулю.
. Збільшення швидкості і зменшення моменту двигуна триватиме до тих пір, поки момент двигуна М на стане рівним М с2 і М Д стане рівним нулю.
При послідовному збудженні е.р.с. обертання Е виявляється функцією двох величин - збільшується швидкості ? і зменшується потоку Ф. В результаті цього величина Е, А значить і величини I Я і М, З ростом швидкості істотно зміняться не буде, що призводить до збереження М Д >0 і подальшого зростання швидкості. Якщо опір пускового реостата R П >0 , То статичне падіння швидкості ?? з при одному і тому ж моменті двигуна буде більше, ніж на природній характеристиці. Тому реостатні характеристики матимуть великий нахил до осі абсцис.
При послідовному збудженні крутний момент пропорційний квадрату струму якоря  і обмеження пускового струму значенням I Я ДОП ? 2,5I ЯН дозволяє отримати набагато більше ніж при незалежному збудженні значення М ДОП \u003d 5 М Н . Коефіцієнт перевантаження двигуна постійного струму з послідовним збудженням по моменту
і обмеження пускового струму значенням I Я ДОП ? 2,5I ЯН дозволяє отримати набагато більше ніж при незалежному збудженні значення М ДОП \u003d 5 М Н . Коефіцієнт перевантаження двигуна постійного струму з послідовним збудженням по моменту
K П \u003d М ДОП / М Н дорівнює п'яти. Такий перевантажувальної здатністю не володіє більше не один електричний двигун. Саме завдяки цій властивості двигуни з послідовним збудженням використовуються в електричному транспорті та підйомних механізмах.
Лекція 8.
^ 2.6. Механічні характеристики двигуна постійного струму з послідовним збудженням. Режим електричного гальмування.
Можливі два режими електричного гальмування: динамічне гальмування та гальмування противовключением. Рекуперативне гальмування здійснити не можливо, так як е.р.с. обертання Ене може бути більше напруги якірного джерела U.
^ динамічне гальмування здійснюється двома способами: з самозбудженням і з незалежним збудженням. Схема включення двигуна і механічні характеристики для першого випадку наведені на рис. 2.10.
Мал. 2.10. а) схема включення двигуна в режимі динамічного гальмування з самозбудженням;
Б) характеристики двигуна в режимі динамічного гальмування з самозбудженням.
Двигун відключений від напруги джерела, а обмотка збудження переключена таким чином, щоб напрямок струму I В в ній було таким же як а в руховому режимі (див. рис. 2.8). Це збереження напрямку струму виключає знищення малого залишкового потоку, пов'язаного з намагнічуванням статора двигуна. Цей потік і є причиною самозбудження: в обмотці якоря, що обертається під дією інерційних сил в колишньому напрямі, наводиться е.р.с. Е, Напрямок якої таке ж, як і в руховому режимі. Під дією Е в контурі динамічного гальмування з'являється струм, що призводить до збільшення потоку Ф, е.р.с. Е і струму I Я . оскільки струм I Я по відношенню до рухового режиму має протилежний зміст, момент двигуна стає гальмівним. Двигун з точки А в першому квадраті переходить в точку В або С на характеристиці динамічного гальмування у другому квадраті. Спочатку процес самозбудження проходить дуже інтенсивно і це призводить до кидка гальмівного моменту, здатного викликати удари в механічної частини приводу. Тому частіше застосовують динамічне гальмування з незалежним збудженням. Схема включення двигуна і механічні характеристики наведені на рис. 2.11.
Мал. 2.11. а) схема включення двигуна в режимі динамічного
Гальмування з незалежним збудженням;
Б) характеристики двигуна в режимі динамічного
Гальмування з незалежним збудженням.
Затискачі якоря двигуна закорочуються на опір динамічного гальмування R ДТ , А обмотка збудження підключається до напруги джерела через опір R В . Струм в ній спрямований як і в руховому режимі і встановлюється рівним номінальному. Характеристики аналогічні характеристикам ДПТ з незалежним збудженням: вони лінійні, розташовані у другому квадраті і проходять через початок координат.
^ гальмування протівоключеніем , Як і для ДПТ з незалежним збудженням, здійснюється в тому випадку, коли обмотки двигуна включені для одного напрямку обертання, а якір двигуна під впливом сил інерції або активного моменту опору обертається в протилежну сторону - проти включення.
Реверсивна схема включення ДПТ з послідовним збудженням приведена на рис. 2.12.
![]()
Мал. 2.12. Реверсивна схема включення ДПТ з послідовним збудженням.
Призначення елементів таке ж, як і на схемі рис. 2.5. При реверсі двигуна з боку якоря напрямок струму в обмотці збудження LM зберігається. Тому всі процеси при гальмуванні аналогічні тим, що відбувається в схемі рис. 2.5. Характеристики двигуна наведені на рис. 2.13.
Мал. 2.13.а) характеристики ДПТ з послідовним збудженням в режимі гальмування протівоквлюченіем.
Б) аналогічні характеристики при активному М с.
Лекція 9.
^ 2.7. Механічні характеристики асинхронних двигунів. Руховий режим.
Асинхронні двигуни (АД) - найпоширеніший вид двигунів, тому що вони більш прості і надійні в експлуатації, при рівній потужності мають меншу масу, габарити і вартість в порівнянні з ДПТ. Схеми включення АТ наведені на рис. 2.14.
До недавнього часу АД з короткозамкненим ротором застосовувалися в нерегульованих електроприводах. Однак з появою тиристорних перетворювачів частоти (ТПЧ) напруги, що живить статорні обмотки АД, двигуни з короткозамкненим ротором почали використовуватися в регульованих електроприводах. В даний час в перетворювачах частоти застосовуються силові транзистори і програмовані контролери. Спосіб регулювання швидкості отримав назву імпульсного і його вдосконалення є надзвичайно важливим напрямом у розвитку електроприводу.
Мал. 2.14. а) схема включення АД з короткозамкненим ротором;
Б) схема включення АТ з фазним ротором.
Рівняння для механічної характеристики АД може бути отримано на підставі схеми заміщення АД. Якщо в цій схемі знехтувати активним опором статора, то вираз для механічної характеристики матиме вигляд:
 ,
,
де  ;
;  .
.
тут М до – критичний момент; S до - відповідне йому критичне ковзання; U ф – діюче значення фазної напруги мережі; ? 0 \u003d 2? F / p - кутова швидкість магнітного поля АД (синхронна швидкість); f - частота напруги живлення; p - число пар полюсів АД; х до - індуктивний фазное опір короткого замикання (визначається зі схеми заміщення); S \u003d (? 0 -?)/? 0 - ковзання (швидкість ротора щодо швидкості обертового поля); R 2 1 - сумарний активний опір фази ротора.
Механічна характеристика АД з короткозамкненим ротором приведена на рис. 2.15.
Мал. 2.15. Механічна характеристика АД з короткозамкненим ротором.
На ній можна виділити три характерні точки. Координати першої точки ( S \u003d 0; ? \u003d? 0 ; М \u003d 0). Вона відповідає режиму ідеального холостого ходу, коли швидкість ротора дорівнює швидкості обертового магнітного поля. Координати другий точки ( S \u003d S до ; М \u003d М до). Двигун працює з максимальним моментом. при М з \u003e М до ротор двигуна буде примусово зупинено, що для двигуна є режимом короткого замикання. Тому що обертає момент двигуна в цій точці і називається критичним М до . Координати третьої точки ( S \u003d 1; ? \u003d 0; М \u003d М п). У цій точці двигун працює в режимі пуску: швидкість ротора? \u003d 0 і на нерухомий ротор діє пусковий момент М п . Ділянка механічної характеристики, розташований між першою і другою характерними точками, називається робочим ділянкою. На ньому двигун працює в сталому режимі. У АД з короткозамкненим ротором при виконанні умов U \u003d U н і f \u003d f н механічна характеристика називається природною. У цьому випадку на робочому ділянці характеристики розташована точка, відповідна номінальному режиму роботи двигуна і має координати ( S н ; ? н ; М н).
Електромеханічна характеристика АД ? \u003d F (I ф ) , Яка на рис.2.15 зображена штриховою лінією, на відміну від електромеханічної характеристики ДПТ, збігається з механічною характеристикою тільки на її робочому ділянці. Це пояснюється тим, під час пуску через змінюється частоти е.р.с. в обмотці ротора Е 2 змінюється частота струму і співвідношення індуктивного і активного опорів обмотки: на початку пуску частота струму велика і індуктивний опір більше активного; зі збільшенням швидкості обертання ротора ? частота струму ротора, а значить і індуктивне опір його обмотки, зменшується. Тому пусковий струм АД в режимі прямого пуску в 5ч7 разів перевищує номінальне значення I фн , А пусковий момент М п дорівнює номінальному М н . На відміну від ДПТ, де під час пуску необхідно обмежувати пусковий струм і пусковий момент, при пуску АД пусковий струм необхідно обмежувати, а пусковий момент збільшувати. Остання обставина найбільш важливо, оскільки ДПТ з незалежним збудженням запускається при М з н , ДПТ з послідовним збудженням при М з н , А АТ при роботі на природній характеристиці при М з н .
У АД з короткозамкненим ротором збільшення М п забезпечується спеціальною конструкцією обмотки ротора. Паз для обмотки ротора роблять глибоким, а саму обмотку розташовують в два шари. При пуску двигуна частота Е 2 і струми ротора великі, що призводить до появи ефекту витіснення струму - струм протікає тільки в верхньому шарі обмотки. Тому збільшується опір обмотки і пусковий момент двигуна М П . Його величина може досягати 1,5 М н .
У АТ з фазним ротором збільшення М П забезпечується за рахунок зміни його механічної характеристики. якщо опір R П , Включене в ланцюг протікання струму ротора, дорівнює нулю - двигун працює на природній характеристиці і М П \u003d М Н . при R П >0 збільшується сумарний активний опір фази ротора R 2 1 . Критичне ж ковзання S до у міру збільшення R 2 1 теж збільшується. Внаслідок цього у АТ з фазним ротором введення R П в ланцюг протікання струму ротора призводить до зміщення М До в сторону великих ковзань. при S До \u003d 1 М П \u003d М До . Механічні характеристики АД з фазним ротором при R П >0 називаються штучними або реостатними. Вони наведені на рис. 2.16.
Мал. 2.16. Механічні характеристики АД з фазним ротором.
Асинхронний двигун з короткозамкненим ротором запуститься при М п \u003e М з і буде працювати в точці А (див. рис. 2.15). Після цього момент опору М з можна збільшувати до М До . АТ, як і двигуни постійного струму, при збільшенні М з буде автоматично, без втручання ззовні, знижувати швидкість ? і збільшувати крутний момент М доти поки М і М з незрівняються за величиною, тобто з усталеного режиму з більшою швидкістю переходити в усталений режим з меншою швидкістю. при зменшенні М з буде спостерігатися зворотне - двигун з усталеного режиму з меншою швидкістю буде автоматично переходити в усталений режим з більшою швидкістю. Робоча ділянка механічної характеристики АД аналогічний механічної характеристиці ДПТ з незалежним збудженням - пряма лінія, нахилена до осі абсцис.
Такими властивостями АТ володіє завдяки е.р.с. Е 2 , Яка наводиться обертовим магнітним полем статора в обмотці ротора. при М з \u003e М динамічний момент М д і швидкість ротора ? зменшується. Магнітне поле статора, що обертається з постійною швидкістю ? 0 (Синхронної швидкістю) буде перетинати обмотку ротора з великою частотою. Тому буде збільшуватися Е 2 , Струм в обмотці ротора, сила Ампера, що діє на її витки, а значить і крутний момент М.
Перевантажувальна здатність АД по моменту визначається відношенням критичного моменту М До до моменту номінальному М Н . Для звичайних АД з короткозамкненим ротором М До / М Н =1,7 , З фазним ротором М До / М Н =1,8 . Для спеціальних кранових АД з короткозамкненим ротором типу МТК і фазним ротором типу МТКФ ставлення М До / М Н \u003d 2,3ч3,4.