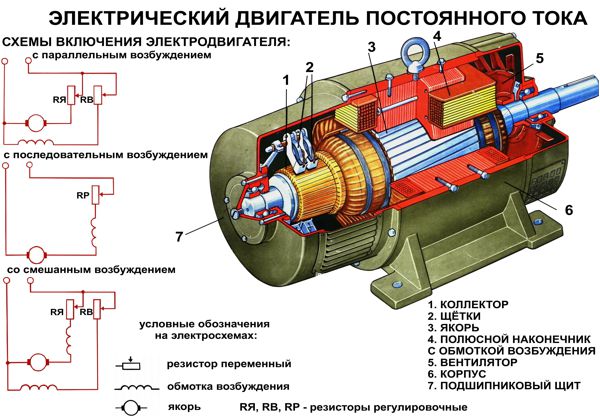
Способи збудження машин постійного струму і їх класифікація. Види порушення та схеми включення двигунів постійного струму
Струм, що протікає в обмотці збудження основних полюсів, створює магнітний потік. Електричні машини постійного струмуслід розрізняти за способом збудження і схемою включення обмотки збудження.
Генератори постійного струму можуть виконуватися з незалежним, паралельним, послідовним і змішаним збудженням.Слід зауважити, що тепер застосування в якості джерел енергії генераторів постійного струму дуже обмежена.
обмотка збудження генератора постійного струму з незалежним збудженнямотримує харчування від незалежного джерела - мережі постійного струму, спеціального збудника, перетворювача і ін. (рис. 1, а). Ці генератори застосовуються в потужних системах, коли напруга збудження повинно бути вибрано відмінним від напруги генератора, в системах, які живляться від генераторів і інших джерел.
Значення струму збудження потужних генераторів становить 1,0-1,5% від струму генераторів і до десятків відсотків для машин потужністю близько десятків ват.
Мал. 1. Схеми генераторів постійного струму: а - з незалежним збудженням; б - з паралельним збудженням; в - з послідовним збудженням; г - зі змішаним збудженням П - споживачі
У г енератора з паралельним збудженнямобмотка збудження включається на напругу самого генератора (дивіться рис. 1, б). Струм якоря I я дорівнює сумі струмів навантаження I п і струму збудження I в: I я = I п + I в
Генератори виконуються зазвичай для середніх потужностей.
обмотка збудження генератора з послідовним збудженнямвключена послідовно в ланцюг якоря і обтекается струмом якоря (рис. 1, в). Процес самозбудження генератора протікає дуже бурхливо. Такі генератори практично не використовуються. На самому початку розвитку енергетики застосовувалася система передачі енергії з послідовно включеними генераторами і двигунами послідовного збудження.
Генератор зі змішаним збудженням має дві обмотки збудження - паралельну ОВП і послідовну ОВСзазвичай з згодним включенням (рис. 1, г). Паралельна обмотка може бути включена до послідовної ( «короткий шунт») або після неї ( «довгий шунт»). МДС послідовної обмотки зазвичай невелика і розрахована тільки на компенсацію падіння напруги в якорі при навантаженні. Такі генератори тепер також практично не застосовуються.
Схеми збудження двигунів постійного струму подібні схемам для генераторів.великої потужності виконуються зазвичай з незалежним збудженням. У двигунів паралельного збудження обмотка збудження живиться від того ж джерела енергії, що і двигун. Обмотка збудження включається безпосередньо на напругу джерела енергії, щоб не позначалося вплив падіння напруги в пусковому опорі (рис. 2).
Мал. 2. Схема двигуна постійного струму з паралельним збудженням
струм мережі Ic складається з струму якоря I я і струму збудження I в.
Схема двигуна послідовного збудженняподібна до схеми на рис. 1, ст. Завдяки послідовній обмотці крутний момент при навантаженні зростає більше, ніж у двигунів паралельного збудження, при цьому швидкість обертання зменшується. Це властивість двигунів визначає їх широке застосування в приводах електровозною тяги: в магістральних електровози, міському транспорті та ін. Падіння напруги в обмотці збудження при номінальному струмі становить одиниці відсотків від номінальної напруги.
двигуни змішаного збудження через наявність послідовної обмотки в деякій мірі мають властивості двигунів послідовного збудження. В даний час вони практично не застосовуються. Двигуни паралельного збудженняіноді виконуються із стабілізуючою (послідовної) обмоткою, що включається відповідно до з паралельною обмоткою збудження, для забезпечення більш спокійної роботи при піках навантаження. МДС такої стабілізуючою обмотки невелика - одиниці відсотків від основної МДС.
Властивості електродвигунів постійного струму визначаються в основному способом включення обмотки збудження. Залежно від цього розрізняють електродвигуни:
з незалежним збудженням: Обмотка збудження живиться від стороннього джерела постійного струму (збудника або випрямляча);
з паралельним збудженням: Обмотка збудження підключена паралельно обмотці якоря;
з послідовним збудженням: Обмотка збудження включена послідовно з обмоткою якоря;
зі змішаним збудженням: Він має дві обмотки збудження, одна підключена паралельно обмотці якоря, а інша - послідовно з нею.
Всі ці електродвигуни мають однаковий пристрій і відрізняються лише виконанням обмотки збудження. Обмотки збудження зазначених електродвигунів виконують так само, як у відповідних генераторів.
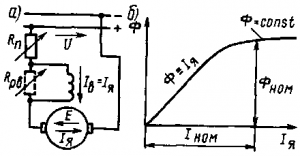
Електродвигун з незалежним збудженням. У цьому електродвигуні (рис. 125, а) обмотка якоря підключена до основного джерела постійного струму (мережі постійного струму, генератору або випрямителю) з напругою U, а обмотка збудження - до допоміжного джерела в напругою U B. У ланцюг обмотки збудження включений регулювальний реостат R рв, а в ланцюг обмотки якоря - пусковий реостат R П. Регулювальний реостат служить для регулювання частоти обертання якоря двигуна, а пусковий - для обмеження струму в обмотці якоря при пуску. Характерною особливістю електродвигуна є те, що його струм збудження I в не залежить від струму I я в обмотці якоря (струму навантаження). Тому, нехтуючи розмагнічуючої дії реакції якоря, можна наближено вважати, що і потік двигуна Ф не залежить від навантаження. При цьому умови відповідно до формул (63 ') і (65) отримаємо, що залежно електромагнітного моменту М і частоти обертання п від струму I я будуть лінійними (рис. 126, а). Отже, лінійної буде і механічна характеристикадвигуна - залежність п (М) (рис. 126, б).
При відсутності в ланцюзі якоря реостата з опором R П швидкісна і механічна характеристики будуть жорсткими, т. Е. З малим кутом нахилу до горизонтальної осі, так як падіння напруги I я? R я в обмотках машини, включених в ланцюг якоря, при номінальному навантаженні становить лише 3-5% від U HOM. Ці характеристики (прямі 1 на рис. 126, а і б) називаються природними. При включенні в ланцюг якоря реостата з опором R П кут нахилу цих характеристик зростає, внаслідок чого можна отримати сімейство реостатних характеристик 2, 3 і 4, що відповідають різним
значенням R п1, R п2 і R П3. чим більше опір R п, тим більший кут нахилу має реостатно характеристика, т. Е. Тим вона м'якша.
Регулювальний реостат R рв дозволяє змінювати струм збудження двигуна I в і його магнітний потік Ф. Як випливає з формули (65), при цьому буде змінюватися і частота обертання п. У ланцюг обмотки збудження ніяких вимикачів і запобіжників не встановлюють, так як при розриві цієї ланцюга різко зменшується магнітний потік електродвигуна (в ньому залишається лише потік від залишкового магнетизму) і виникає аварійний режим. Якщо електродвигун працює при холостому ході або невеликому навантаженні на валу, то частота обертання, як випливає з формули (65), різко зростає (двигун йде в рознос). При цьому сильно збільшується струм в обмотці якоря I я [см. формулу (66)] і може виникнути круговий вогонь. Щоб уникнути цього захист повинен відключити електродвигун від джерела живлення. Різке збільшення частоти обертання при обриві ланцюга обмотки збудження пояснюється тим, що в цьому випадку різко зменшуються магнітний потік Ф (до значення потоку Ф ост від залишкового магнетизму) і е. д. з. Е і зростає струм I я. А так як прикладена напруга U залишається незмінним, то частота обертання п буде збільшуватися до тих пір, поки е. д. з. Е не досягне значення, приблизно рівного U (що необхідно для рівноважного стану електричного колаякоря, при якому E = U - I я? R я).
При навантаженні на валу, близькою до номінальної, електродвигун в разі розриву ланцюга збудження зупиниться, так як електромагнітний момент, який може розвинути двигун при значному зменшенні магнітного потоку, зменшується [см. формулу (63 ")] і стане менше навантажувального моменту на валу. У цьому випадку так само різко збільшується струм I я [так як у формулі (64) е. д. с. Е буде дорівнює нулю], і машина повинна бути відключена від джерела живлення.
Слід зазначити, що частота обертання n 0 відповідає ідеальному холостому ходу, коли двигун не споживає з мережі електричної енергіїі його електромагнітний момент дорівнює нулю. В реальних умовах в режимі холостого ходу двигун споживає з мережі струм холостого ходу I 0, необхідний для компенсації внутрішніх втрат потужності (див. § 25), і розвиває деякий момент М 0, необхідний для подолання сил тертя в машині. Тому в дійсності частота обертання при холостому ході менше nо.
Залежність частоти обертання n і електромагнітного моменту М від потужності Р 2 (рис. 126, в) на валу двигуна, як випливає з розглянутих співвідношень, є лінійної. Залежності струму обмотки якоря I я і потужності Р 1 від Р 2 також практично лінійні. Струм I я і потужність Р 1 при Р 2 = 0 є струм холостого ходу I 0 і потужність Р 0, споживану при холостому ході. Крива к. П. Д. Має характер, загальний для всіх електричних машин (див. § 37).
Електродвигун з паралельним збудженням.У цьому електродвигуні (див. Рис. 125, б) обмотки збудження і якоря живляться від одного і того ж джерела електричної енергії з напругою U. У ланцюг обмотки збудження включений регулювальний реостат R рв, а в ланцюг обмотки якоря - пусковий реостат R п. в даному електродвигуні має місце, по суті, роздільне харчування ланцюгів обмоток якоря і збудження, внаслідок чого струм збудження I в не залежить від струму обмотки якоря I в. Тому електродвигун з паралельним збудженням матиме такі ж характеристики, як і двигун з незалежним збудженням. Однак двигун з паралельним збудженням працює нормально тільки при харчуванні від джерела постійного струму з постійною напругою.
При харчуванні електродвигуна від джерела із змінним напругою (генератор або керований випрямляч) зменшення напруги живлення U викликає відповідне зменшення струму збудження I в і магнітного потоку Ф, що призводить до збільшення струму обмотки якоря I я [см. формулу (66)]. Це обмежує можливість регулювання частоти обертання якоря шляхом зміни напруги живлення U. Тому електродвигуни, призначені для живлення від генератора або керованого випрямляча, повинні мати незалежне збудження.
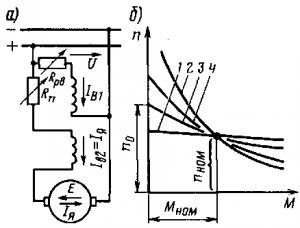
Електродвигун з послідовним збудженням.Для обмеження струму при пуску в ланцюг обмотки якоря включений пусковий реостат R п (рис. 127, а), а для регулювання частоти обертання
паралельно обмотці збудження може бути включений регулювальний реостат R рв. Характерною особливістю цього електродвигуна є те, що його струм збудження I в дорівнює або пропорційний (при включенні реостата R рв) току обмотки якоря I я, тому магнітний потік Ф залежить від навантаження двигуна (рис. 127, б).
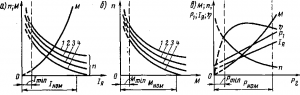
При струмі обмотки якоря I я, меншому (0,8-0,9) номінального струму I ном, магнітна система машини не насичена і можна вважати, що магнітний потік Ф змінюється прямо пропорційно току I я. Тому швидкісна характеристика електродвигуна буде м'яка - зі збільшенням струму I я частота обертання n буде різко зменшуватися (рис. 128, а). Зменшення частоти обертання n, як випливає з формули (65), відбувається через збільшення падіння напруги I я? R я у внутрішній опір? R я ланцюга обмотки якоря, а також через збільшення магнітного потоку Ф.
Електромагнітний момент М при збільшенні струму I я різко зростатиме, так як в цьому випадку збільшується і магнітний потік Ф, т. Е. Момент М буде пропорційний току I я. Тому при струмі I я, меншому (0,8-0,9) I ном, швидкісна характеристика має форму гіперболи, а моментная - параболи.
При токах I я> I ном залежності М і п від I я лінійні, так як в цьому режимі магнітна ланцюг буде насичена і магнітний потік Ф при зміні струму I я мінятися не буде.
Механічна характеристика, т. Е. Залежність п від М (рис. 128,6), може бути побудована на підставі залежностей n і М від I я. Крім природної характеристики 1, можна шляхом включення в ланцюг обмотки якоря реостата з опором R п отримати сімейство реостатних характеристик 2, 3 і 4. Ці характеристики відповідають різним значенням R п1, R п2 і R П3; при цьому чим більше R п, тим нижче розташовується характеристика. Механічна характеристика розглянутого двигуна м'яка і має гіперболічний характер. При малих навантаженнях магнітний потік Ф сильно зменшується, частота обертання n різко зростає і може перевищити максимально допустиме значення (двигун йде в рознос). Тому такі двигуни не можна застосовувати для приводу механізмів, що працюють в режимі холостого ходу і при невеликому навантаженні (різні верстати, транспортери та ін.). Зазвичай мінімально допустиме навантаження для двигунів великої і середньої потужності становить (0,2-0,25) I ном. Щоб запобігти можливості роботи двигуна без навантаження, його з'єднують з приводним механізмом жорстко (зубчастої передачею або глухий муфтою); застосування пасової передачі або фрикційної муфти неприпустимо.
Незважаючи на зазначений недолік, двигуни з послідовним збудженням широко застосовують, особливо там, де мають місце зміни моменту навантаження в широких межах і важкі умови пуску: у всіх тягових приводах (електровози, тепловози, електропоїзди, електрокари, електронавантажувачі та ін.), А також в приводах вантажопідйомних механізмів (крани, ліфти та ін.). Пояснюється це тим, що при м'якій характеристиці збільшення моменту навантаження призводить до меншого зростань струму і споживаної потужності, ніж у двигунів з незалежним і паралельним збудженням; тому двигуни з послідовним збудженням краще переносять перевантаження. Крім того, ці двигуни мають великий пусковий момент, чим двигуни з паралельним і незалежним збудженням, так як при збільшенні струму обмотки якоря при пуску відповідно збільшується і магнітний потік.
Якщо прийняти, наприклад, що короткочасний пусковий струмможе в 2 рази перевищувати номінальний робочий струм машини, і знехтувати впливом насичення, реакцією якоря і падінням напруги в ланцюзі його обмотки, то в двигуні з послідовним збудженням пусковий момент буде в 4 рази більше номінального (у 2 рази збільшуються і струм, і магнітний потік ), а в двигунах з незалежним і паралельним збудженням - тільки в 2 рази більше. Насправді через насичення магнітного кола магнітний потік не збільшується пропорційно току, але все ж пусковий момент двигуна з послідовним збудженням при інших рівних умовах буде значно більше пускового моменту такого ж двигуна з незалежним або паралельним збудженням.
Залежно п і М від потужності Р 2 на валу електродвигуна (рис. 128, в), як випливає з розглянутих вище положень, є нелінійними; Залежно P 1, I я і? від Р 2 мають таку ж форму, як і у двигунів з паралельним збудженням.
Електродвигун зі змішаним збудженням.У цьому електродвигуні (рис. 129, а) магнітний потік Ф створюється в результаті спільної дії двох обмоток збудження - паралельної (або незалежної) і послідовної, за якими проходять струми збудження I в1 і I В2 = I я. Тому
Ф = Ф остан + Ф пар
Ф остан - магнітний потік послідовної обмотки, що залежить від струму I я;
Ф пар - магнітний потік паралельної обмотки, який не залежить від навантаження (визначається струмом збудження I в1).
Механічна характеристика електродвигуна зі змішаним збудженням (рис. 129, б) розташовується між характеристиками двигунів з паралельним (пряма 1) і послідовним (крива 2) збудженням. Залежно від співвідношення магніторушійних сил паралельної і послідовної обмоток при номінальному режимі можна наблизити характеристики двигуна зі змішаним збудженням до характеристики 1 (крива 3 при малій м. Д. С. Послідовної обмотки) або до характеристики 2
(Крива 4 при малій м. Д. С. Паралельної обмотки). Перевагою двигуна зі змішаним збудженням є те, що він, володіючи м'якою механічною характеристикою, може працювати при холостому ході, коли Ф післ = 0. У цьому режимі частота обертання його якоря визначається магнітним потоком Ф пар і має обмежене значення (двигун не йде в рознос) .
Двигуни постійного струму в залежності від способів їх порушення, як вже зазначалося, поділяються на двигуни з незалежним, паралельним(Шунтовим), послідовним(Серієсний) і змішаним (компаундних) збудженням.
двигуни незалежного збудження , Вимагають два джерела живлення (ріс.11.9, а). Один з них необхідний для живлення обмотки якоря (висновки Я 1і Я2), А інший - для створення струму в обмотці збудження (висновки обмотки Ш1і Ш2). додаткове опір Rдв ланцюзі обмотки якоря необхідно для зменшення пускового струму двигуна в момент його включення.
З незалежним збудженням виконуються в основному потужні електричні двигуни з метою більш зручного і економічного регулювання струму збудження. Перетин дроту обмотки збудження визначається в залежності від напруги її джерела живлення. Особливістю цих машин є незалежність струму збудження, а відповідно і основного магнітного потоку, від навантаження на валу двигуна.
Двигуни з незалежним збудженням за своїми характеристиками практично збігаються з двигунами паралельного збудження.
Двигуни паралельного збудженнявключаються відповідно до схеми, показаної на ріс.11.9, б. затискачі Я 1і Я2відносяться до обмотці якоря, а затискачі Ш1і Ш2- до обмотці збудження (до шунтовой обмотці). змінні опору Rді Rвпризначені відповідно для зміни струму в обмотці якоря і в обмотці збудження. Обмотка збудження цього двигуна виконується з великої кількості витків мідного дроту порівняно малого перетину і має значний опір. Це дозволяє підключати її на повне напруга мережі, вказане в паспортних даних.
Особливістю двигунів цього типу є те, що при їх роботі забороняється від'єднувати обмотку збудження від якірного ланцюга. В іншому випадку при розмиканні обмотки збудження в ній з'явиться неприпустиме значення ЕРС, яке може привести до виходу з ладу двигуна і до поразки обслуговуючого персоналу. З тієї ж причини не можна розмикати обмотку збудження і при виключенні двигуна, коли його обертання ще не припинилося.
Зі збільшенням частоти обертання додатковий (додаткове) опір Rд в ланцюзі якоря слід зменшувати, а при досягненні сталої частоти обертання - вивести повністю.
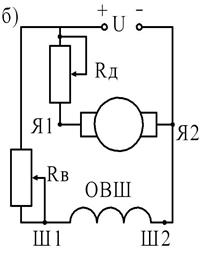
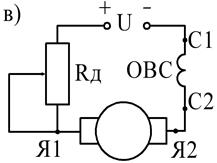
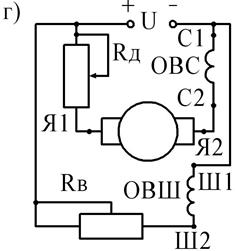
Ріс.11.9. Види порушення машин постійного струму,
а - незалежного збудження, б - паралельного збудження,
в - послідовного збудження, г - змішаного збудження.
ОВШ - обмотка збудження шунтовая, ОВС - обмотка збудження серієсний, "ОВН - обмотка незалежного збудження, Rд -додаткове опір в ланцюзі обмотки якоря, Rв- додатковий опір в ланцюзі обмотки збудження.
Відсутність додаткового опору в обмотці якоря в момент пуску двигуна може призвести до появи великої пускового струму, що перевищує номінальний струмякоря в 10 ... 40 разів .
Важливою властивістю двигуна паралельного збудження служить практично постійна його частота обертання при зміні навантаження на валу якоря. Так при зміні навантаження від холостого ходу до номінального значення частота обертання зменшується всього лише на (2.. 8)% .
Другою особливістю цих двигунів служить економічне регулювання частоти обертання, при якому відношення максимальної швидкості до найменшої може становити 2:1 , А при спеціальному виконанні двигуна - 6:1 . Мінімальна частота обертання обмежується насиченням магнітного ланцюга, яке не дозволяє вже збільшувати магнітний потік машини, а верхня межа частоти обертання визначається стійкістю машини - при значному ослабленні магнітного потоку двигун може піти «в рознос».
Двигуни послідовного збудження(Серієсний) включаються за схемою, (ріс.11.9, в). висновки З 1і С2відповідають серієсний (послідовної) обмотці збудження. Вона виконується з порівняно незначною кількістю витків в основному мідного дроту великого перетину. Обмотка збудження з'єднується послідовно з обмоткою якоря. додаткове опір Rдв ланцюзі обмоток якоря і збудження дозволяє зменшити пусковий струм і виробляти регулювання частоти обертання двигуна. У момент включення двигуна воно повинно мати таку величину, при якій пусковий струм буде складати (1,5 ... 2,5) Iн. Після досягнення двигуном сталої частоти обертання додатковий опір Rдвиводиться, тобто встановлюється рівним нулю.
Ці двигуни при пуску розвивають великі пускові моменти обертання і повинні запускатися при навантаженні не менше 25% її номінального значення. Включення двигуна при меншій потужності на його валу і тим більше в режимі холостого ходу не допускається. В іншому випадку двигун може розвинути неприпустимо великі обороти, що викличе вихід його з ладу. Двигуни цього типу широко застосовуються в транспортних і підйомних механізмах, в яких необхідно змінювати частоту обертання в широких межах.
Двигуни змішаного збудження(Компаундні), займають проміжне положення між двигунами паралельного і послідовного збудження (ріс.11.9, г). Велика приналежність їх до того чи іншого виду залежить від співвідношення частин основного потоку збудження, створюваних паралельної або послідовної обмотками збудження. У момент включення двигуна для зменшення пускового струму в ланцюг обмотки якоря включається додатковий опір Rд. Цей двигун має гарні тяговими характеристиками і може працювати в режимі холостого ходу.
Пряме (безреостатаное) включення двигунів постійного струму всіх видів порушення допускається потужністю не більше одного кіловата.
Позначення машин постійного струму
В даний час найбільш широкого поширення набули машини постійного струму загального призначення серії 2Пі найбільш нової серії 4П.Крім цих серій випускаються двигуни для кранових, екскаваторних, металургійних та інших приводів серії Д.Виготовляються двигуни і спеціалізованих серій.
двигуни серій 2Пі 4Ппідрозділяються по осі обертання, як це прийнято для асинхронних двигунів змінного струмусерії 4А. машини серії 2Пмають 11 габаритів, що відрізняються по висоті обертання осі від 90 до 315 мм. Діапазон потужностей машин цієї серії складає від 0,13 до 200 кВт для електричних двигуніві від 0,37 до 180 кВт для генераторів. Двигуни серій 2П і 4П розраховуються на напругу 110, 220, 340 і 440 В. Їх номінальні частотиобертання складають 750, 1000, 1500,2200 і 3000 об / хв.
Кожен з 11 габаритів машин серії 2Пмає станини двох довжин (М і L).
Електричні машини серії 4Пмають кращі деякі техніко - економічні показники в порівнянні з серією 2П. трудомісткість виготовлення серії 4Ппорівняно з 2Пзнижена в 2,5 ... 3 рази. При цьому витрата міді знижується на 25 ... 30%. По ряду конструктивних особливостей, в тому числі за способом охолодження, щодо захисту від атмосферних впливів, по використанню окремих деталей і вузлів машини серії 4Пуніфіковані з асинхронними двигунамисерії 4Аі АІ .
Позначення машин постійного струму (як генераторів, так і двигунів) представляється в такий спосіб:
ПХ1Х2ХЗХ4,
де 2П- серія машини постійного струму;
XI- виконання за типом захисту: Н - захищене з самовентиляцією, Ф - захищене з незалежною вентиляцією, Б - закрите з природним охолодженням, О - закрите з обдувом від стороннього вентилятора;
Х2- висота осі обертання (двозначне або тризначне число) в мм;
ХЗ- умовна довжина статора: М - перша, L - друга, Г - з тахогенератором;
Як приклад можна привести позначення двигуна 2ПН112МГУ- двигун постійного струму серії 2П, Захищеного виконання з самовентиляцією Н,112 висота осі обертання в мм, перший розмір статора М, Укомплектований тахогенератором Г, Використовується для помірного клімату У.
За потужностями електричні машини постійного струму умовно можуть бути поділені на такі групи:
Мікромашини ........................... ... менше 100 Вт,
Дрібні машини ........................... від 100 до 1000 Вт,
Машини малої потужності ............ ..від 1 до 10 кВт,
Машини середньої потужності ......... ..від 10 до 100 кВт,
Великі машини ........................ ..від 100 до 1000 кВт,
Машини великий потужність ......... .більш 1000 кВт.
за номінальній напрузіелектричні машини підрозділяються умовно наступним чином:
Низької напруги ............... .меньше 100 В,
Середньої напруги ............ .від 100 до 1000 В,
Високої напруги ............... вище 1000В.
За частотою обертання машини постійного струму можуть бути представлені як:
Тихохідні ............... Менш 250 об / хв.,
Середньої швидкості ......... від 250 до 1000 об / хв.,
Швидкохідні ............ .від 1000 до 3000 об / хв.
Сверхбистроходний ... ..више 3000 об / хв.
Завдання і методика виконання роботи.
1.Изучить пристрій і призначення окремих частин електричних машин постійного струму.
2. Визначити висновки машини постійного струму, що відносяться до обмотці якоря і до обмотки збудження.
Висновки, що відповідають тій чи іншій обмотці, можуть бути визначені мегомметром, омметром або за допомогою електричної лампочки. При використанні мегомметра один його кінець приєднується до одного з висновків обмоток, а іншим по черзі стосуються до решти. Виміряний опір, рівний нулю, вкаже на відповідність двох висновків однієї обмотки.
3.Распознать за висновками обмотку якоря і обмотку збудження. Визначити вид обмотки збудження (паралельного збудження або послідовного).
Цей досвід можна здійснити за допомогою електричної лампочки, яка підключається послідовно з обмотками Постійна напруга слід подавати плавно, поступово підвищуючи його до зазначеного номінального значення в паспорті машини.
З урахуванням малого опору якірної обмотки і обмотки послідовного збудження лампочка загориться яскраво, а їх опору, виміряні мегомметром (або омметром) будуть практично рівні нулю.
Лампочка, поєднана послідовно з паралельної обмоткою збудження, буде горіти тьмяно. Значення опору паралельної обмоткою збудження повинно знаходитися в межах 0,3 ... 0,5 кОм .
Висновки якірної обмотки можна розпізнати шляхом приєднання одного кінця мегомметра до щіток, торкаючись при цьому іншим його кінцем до висновків обмоток на щитку електричної машини.
Висновки обмоток електричної машини слід позначити на зображеної в звіті умовної етикетці висновків.
 Виміряти опору обмоток і опір ізоляції. Опір обмоток можна виміряти за схемою амперметра і вольтметра. Опір ізоляції між обмотками і обмотками щодо корпусу перевіряється мегомметром, розрахованим на напругу 1 кВ. Опір ізоляції між обмоткою якоря і обмоткою збудження і між ними і корпусом має бути не нижче 0,5 МОм. Дані замірів відобразити в звіті.
Виміряти опору обмоток і опір ізоляції. Опір обмоток можна виміряти за схемою амперметра і вольтметра. Опір ізоляції між обмотками і обмотками щодо корпусу перевіряється мегомметром, розрахованим на напругу 1 кВ. Опір ізоляції між обмоткою якоря і обмоткою збудження і між ними і корпусом має бути не нижче 0,5 МОм. Дані замірів відобразити в звіті.
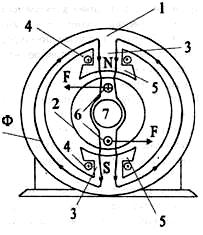
Зобразити умовно в поперечному розрізі головні полюси з обмоткою збудження і якір з витками обмотки, що знаходяться під полюсами (подібно ріс.11.10). Самостійно прийняти напрямок струму в обмотках збудження і якоря. Вказати при цих умовах напрямок обертання двигуна.
Мал. 11.10. Двополюсна машина постійного струму:
1 - станина; 2 -якорь; 3 - головні полюси; 4 - обмотка збудження; 5 - полюсні наконечники; 6 - обмотка якоря; 7 - колектор; Ф - основний магнітний потік; F - сила, що діє на провідники обмотки якоря.
Контрольні питанняі завдання для самостійної підготовки
1: Пояснити будову та принцип дії двигуна і генератора постійного струму.
2. Пояснити призначення колектора машин постійного струму.
3.Дать поняття полюсного поділу та привести вираз для його визначення.
4.Назвать основні види обмоток, що застосовуються в машинах постійного струму, і знати способи їх виконання.
5.Указать основні переваги двигунів паралельного збудження.
6.Каково конструктивні особливості обмотки паралельного збудження в порівнянні з обмоткою послідовного збудження?
7. У чому особливість пуску двигунів постійного струму послідовного збудження?
8.Сколько паралельних гілок мають проста хвильова і проста петлевая обмотки машин постійного струму?
9.Как позначаються машини постійного струму? Привести приклад позначення.
10.Какой величини допускається опір ізоляції між обмотками машин постійного струму і між обмотками і корпусом?
11. Які величини може досягти ток в момент пуску двигуна при відсутності додаткового опору в ланцюзі обмотки якоря?
12.Як величини допускається пусковий струм двигуна?
13.В яких випадках допускається пуск двигуна постійного струму без додаткового опору в ланцюзі обмотки якоря?
14.За рахунок чого можна змінити ЕРС генератора незалежного збудження?
15.Каково призначення додаткових полюсів машини постійного струму?
16.При яких навантаженнях допускається включення двигуна послідовного збудження?
17.Чем визначається величина основного магнітного потоку?
18.Напісать вираження ЕРС генератора і моменту обертання двигуна. Дати поняття входять в них складових.
Лабораторна робота 12.
Схема двигуна.
Схема двигуна паралельного збудження зображена на рис. 1.25. Обмотка якоря і обмотка збудження включені паралельно. У цій схемі: I - струм, споживаний двигуном з мережі, I я - струм якоря, I в - струм збудження. З першого закону Кірхгофа випливає, що I = I я + I в.
Природна механічна характеристика. Природна механічна характеристика описується формулою (1.6).
При холостому ході М = 0 і n х = U / С Е Ф.
Якщо Ф = const, то рівняння механічної характеристики набуває вигляду:
n = nх– bМ, (1.8)
де b = R я / С Е Ф.
З (1.8) випливає, що механічна характеристика (рис. 1.26, пряма 1) - пряма з кутом нахилу a і кутовим коефіцієнтом b. Так як у двигунів постійного струму R я мало, то зі збільшенням навантаження на валу частота обертання n змінюється незначно - характеристики подібного типу називаються «жорсткими».
Струм, споживаний двигуном з мережі, практично зростає пропорційно моменту навантаження. Дійсно, М »М ем = С м I я Ф, і так як у двигуна паралельного збудження Ф = const, то I я ~ М.
Регулювання частоти обертання.
Регулювання частоти обертання можливо з (1.6) трьома способами: зміною магнітного потоку головних полюсів Ф, зміною опору ланцюга якоря R я і зміною підводиться до ланцюга якоря напруги U (зміна n за рахунок зміни моменту навантаження М в поняття регулювання не входить).
 Регулювання n зміною магнітного потоку Ф здійснюється за допомогою регулювального реостата R р. При збільшенні опору реостата струм збудження I в і магнітний потік головних полюсів Ф зменшуються. Це призводить, по-перше, до збільшення частоти обертання холостого ходу n х і, по-друге, до збільшення коефіцієнта b, тобто до збільшення кута нахилу механічної характеристики. Однак b залишається невеликим і жорсткість механічних характеристик зберігається. На рис. 1.28 крім природної характеристики 1, що відповідає максимальному магнітному потоку Ф, наведено сімейство механічних характеристик 2-4, знятих при зменшеному магнітному потоці. З характеристик слід, що зміною магнітного потоку можна тільки збільшувати частоту обертання щодо природної характеристики. Практично частоту обертання таким методом можна збільшувати не більше ніж в 2 рази, так як збільшення швидкості призводить до погіршення комутації і навіть механічних пошкоджень машини.
Регулювання n зміною магнітного потоку Ф здійснюється за допомогою регулювального реостата R р. При збільшенні опору реостата струм збудження I в і магнітний потік головних полюсів Ф зменшуються. Це призводить, по-перше, до збільшення частоти обертання холостого ходу n х і, по-друге, до збільшення коефіцієнта b, тобто до збільшення кута нахилу механічної характеристики. Однак b залишається невеликим і жорсткість механічних характеристик зберігається. На рис. 1.28 крім природної характеристики 1, що відповідає максимальному магнітному потоку Ф, наведено сімейство механічних характеристик 2-4, знятих при зменшеному магнітному потоці. З характеристик слід, що зміною магнітного потоку можна тільки збільшувати частоту обертання щодо природної характеристики. Практично частоту обертання таким методом можна збільшувати не більше ніж в 2 рази, так як збільшення швидкості призводить до погіршення комутації і навіть механічних пошкоджень машини.
Інший спосіб регулювання швидкості пов'язаний з включенням послідовно з якорем регулювального реостата R я.р (пусковий реостат R п для цієї мети непридатний, так як він розрахований на короткочасний режим роботи). Формула (1.6) при цьому приймає вигляд:
n =  ,
,
звідки випливає, що швидкість при холостому ході при будь-якому опорі R я.р однакова, а коефіцієнт b і, отже, нахил механічних характеристик 5-7 збільшується (рис. 1.26). Регулювання частоти обертання цим способом призводить до зменшення частоти обертання щодо природної характеристики. Крім того, воно неекономічно, оскільки пов'язано з великою потужністю втрат (R я.р I) в регулювальному реостате, по якому протікає весь струм якоря.
 Третій спосіб регулювання частоти обертання - безреостатное зміна підводиться до якоря напруги. Він можливий тільки в разі, коли якір двигуна живиться від окремого джерела, напруга якого можна регулювати. В якості регульованого джерела застосовуються окремі, спеціально призначені для цього двигуна генератори або керовані вентилі (тиратрони, ртутні випрямлячі, тиристори). У першому випадку утворюється система машин, звана системою Г-Д(Генератор - двигун), (рис. 1.27). Вона застосовується для плавного регулювання в широких межах частоти обертання потужних двигунів постійного струму і в системах автоматичного управління. Система регулювання з керованими вентилями УВ (рис. 1.28) застосовується для регулювання частоти обертання двигунів меншої потужності. Її перевага - велика економічність.
Третій спосіб регулювання частоти обертання - безреостатное зміна підводиться до якоря напруги. Він можливий тільки в разі, коли якір двигуна живиться від окремого джерела, напруга якого можна регулювати. В якості регульованого джерела застосовуються окремі, спеціально призначені для цього двигуна генератори або керовані вентилі (тиратрони, ртутні випрямлячі, тиристори). У першому випадку утворюється система машин, звана системою Г-Д(Генератор - двигун), (рис. 1.27). Вона застосовується для плавного регулювання в широких межах частоти обертання потужних двигунів постійного струму і в системах автоматичного управління. Система регулювання з керованими вентилями УВ (рис. 1.28) застосовується для регулювання частоти обертання двигунів меншої потужності. Її перевага - велика економічність.
Регулювання частоти обертання зміною U практично можливо тільки в сторону зменшення, так як збільшення напруги вище номінального неприпустимо через різке погіршення комутації. З (1.9) випливає, що при зменшенні напруги зменшується швидкість холостого ходу n х, а нахил механічних характеристик 8-10 не змінюється (див. Рис. 1.26), вони залишаються жорсткими навіть при низькій напрузі. Діапазон регулювання (n max / n min) таким способом 6: 1-8: 1. Він може бути значно розширений при застосуванні спеціальних схем із зворотними зв'язками.
Регулювальна характеристика.
Регулювальна характеристика n = f (I в) двигуна паралельного збудження зображена на рис. 1.29.
Її характер визначається залежністю (1.5), з якої випливає, що частота обертання обернено пропорційна магнітному потоку і, отже, струму збудження I в. При струмі збудження I в = 0, що може бути при обриві ланцюга збудження, магнітний потік дорівнює залишковим Ф ост і частота обертання стає настільки великою, що двигун може механічно зруйнуватися, - подібне явище називається розносом двигуна.
Фізично явище розносу пояснюється тим, що обертає момент (1.2) при зменшенні магнітного потоку, здавалося б, повинен зменшитися, однак струм якоря I я = (U - E) / R я збільшується значніше, так як зменшується Е (1.1) і різницю U - E збільшується в більшому ступені (зазвичай Е »0,9 U).
 Гальмівні режими.
Гальмівні режими.
Гальмівні режими двигуна мають місце тоді, коли електромагнітний момент, що розвивається двигуном, діє проти напрямку обертання якоря. Вони можуть виникати в процесі роботи двигуна при зміні умов роботи або створюватися штучно з метою швидкого зменшення швидкості, зупинки або реверсування двигуна.
У двигуна паралельного збудження можливі три гальмівних режиму: генераторное гальмування з поверненням енергії в мережу, гальмування противовключением і динамічне гальмування.
Генераторнегальмуваннявиникає в тих випадках, коли частота обертання якоря n стає більше частоти обертання при ідеальному (тобто при М пр = 0) холостому ході n x (n> n x). Перехід в цей режим з режиму двигуна можливий, наприклад, при спуску вантажу, коли момент, створюваний вантажем, прикладений до якоря в тому ж напрямку, що і електромагнітний момент двигуна, тобто тоді, коли момент навантаження діє згідно з електромагнітним моментом двигуна і він набирає швидкість, більшу ніж n x. Якщо n> nx, то Е> U c (де U c - напруга мережі) і струм двигуна змінює свій знак (1.4) - електромагнітний момент з крутного стає гальмівним, а машина з режиму двигуна переходить в режим генератора і віддає енергію в мережу ( рекуперація енергії). Перехід машини з рухового режиму в генераторний ілюструється механічною характеристикою (рис. 1.30). Нехай в руховому режимі a 1 - робоча точка; їй відповідає момент М. Якщо частота обертання збільшується, то робоча точка за влучним висловом 1 з квадранта I переходить в квадрант II, наприклад, в робочу точку a 2, якій відповідає частота обертання n і гальмівний момент - М.
гальмуванняпротивовключениемвиникає в працюючому двигуні, коли напрямок струму в якорі або струму збудження переключається на протилежне. Електромагнітний момент при цьому змінює знак і стає гальмівним.
Роботі двигуна з протилежним напрямком обертання відповідають механічні характеристики, які містяться в квадрантах II і III (наприклад, природна характеристика 2 на рис. 1.30).
Раптовий перехід на цю характеристику практично неприпустимий, оскільки супроводжується надмірно великим кидком струму і гальмівного моменту. З цієї причини одночасно з перемиканням однієї з обмоток в ланцюг якоря включається додатковий опір R доб, що обмежує струм якоря.
Механічна характеристика режиму з R доб має великий нахил (пряма 3). При переході в режим противовключения частота обертання n в перший момент змінитися не може (через інерційності якоря) і робоча точка з положення a 1 перейде в стан a 3 на нової характеристиці. Через появу М тор частота обертання n буде швидко падати до тих пір, поки робоча точка a 3 не перейде в стан a 4, відповідне зупинки двигуна. Якщо в цей момент двигун не відключити від джерела живлення, то якір змінить напрямок обертання. Машина почне працювати в руховому режимі з новим напрямком обертання, а її робоча точка a 5 буде перебувати на механічній характеристиці 3 в квадраті III.
 динамічнегальмуваннявиникає в тих випадках, коли якір двигуна відключається від мережі і замикається на опір динамічного гальмування R д.т.н. Рівняння характеристики (1.6) набуває вигляду:
динамічнегальмуваннявиникає в тих випадках, коли якір двигуна відключається від мережі і замикається на опір динамічного гальмування R д.т.н. Рівняння характеристики (1.6) набуває вигляду:
n = 
що відповідає сімейству прямих 4 (при різних R д.т), що проходять через початок координат. При перемиканні в цей режим робоча точка a 1 переходить на одну з характеристик 4, наприклад, в точку a 6, а потім переміщається по прямій 4 до нуля. Якір двигуна гальмується до повної зупинки. Зміною опору R д.т можна регулювати струм якоря і швидкість гальмування.
Існує кілька можливих різновидів побудови ел моторів, що працюють від джерела постійної напруги. Принцип їх дії однаковий, а відмінності полягають в особливостях підключення обмотки збудження (ОВ) і якоря (Я).
Свою назву ел двигун постійного струму з паралельним збудженням отримав тому, що його обмотка Я і ОВ з'єднуються один з одним саме таким чином. Електродвигун такого різновиду забезпечує потрібні режими, перевершуючи вироби послідовного і змішаного типів тоді, коли потрібно практично постійна швидкість його функціонування.
- висновок
Побудова двигуна і область його застосування
Схема електродвигуна розглянутого типу зображена нижче.
З неї випливає:
- загальний струм, споживаний ел мотором від джерела, становить I = I Я + I В, де I Я, I В - струми через якір, обмотку збудження, відповідно;
- одночасно I В не залежить від I Я, тобто не залежить від навантаження.
Принцип дії електромотора визначає його тягові властивості. Пристрій застосовується тоді, коли пуск не вимагає забезпечення високого моменту, тобто коли режими експлуатації приводних механізмів не передбачають створення великих стартових навантажень. Це типово для верстатів і вентиляторів.
Для практики цінні такі корисні тягові параметри подібних ел механізмів як
- стійкість роботи при коливаннях навантаження;
- висока економічність через те, що I Я не протікає через ОВ.
Пуск при недостатньому моменті забезпечується переходом на схему змішаного типу.
Поведінка електромотора при зміні навантажень
Механічна характеристика показує стійкість роботи електромотора в широкому діапазоні зміни навантажень, описуючи залежність моменту, створюваного ел двигуном, від швидкості функціонування вала.
Тягові характеристики механізму даного типу дозволяють зберегти величину моменту при значних зміни числа обертів вала. Зазвичай тягові параметри агрегату повинен забезпечувати зменшення цього параметра не більше ніж на 5%. Нескладне дослідження демонструє: гальмівні параметри через оборотності процесів виявляються аналогічними. Ці положення поширюються також на випадок застосування змішаного збудження.
Говорячи іншими словами, для такого ел мотора характерна жорстка характеристика. Такий характер роботи вважається важливою перевагою агрегату даного типу.
Різновиди підходів до регулювання частоти обертання
Принцип дії паралельного включення обмоток забезпечує плавний пускв поєднанні з великим діапазоном зміни кількості оборотів вала в процесі роботи за допомогою реостатів. Вони ж забезпечують нормальний пуск двигуна обмеженням струму.
Для агрегатів паралельного типу застосовуються методи управління швидкістю функціонування зміною:
- магнітного потоку головних полюсів;
- опору кола якоря;
- подається на нього напруги.
Об'єктом впливу є обмотка збудження, обмотка якоря, його робоча напруга.
Зміна магнітного потоку здійснюється за допомогою послідовного реостата R Р. При збільшенні його опору ОВ пропускає менший струм, що супроводжується зменшенням магнітного потоку. Зовнішнім проявом такої дії стає нарощування числа обертів Я на холостому ході. Дослідження показує, що відбувається збільшення кута нахилу характеристики.
Другий принцип заснований на включенні в ланцюг харчування якоря додаткового послідовного регулювального реостата. При збільшенні його опору швидкість обертання Я зменшується, тоді як його природна механічна характеристика набуває більший нахил. Через послідовного включення з основною обмоткою реостата додаткового опору, на якому розсіюється значна потужність, відбувається помітне падіння економічності.
Третій принцип супроводжується певним ускладненням схемних рішень і вимагає застосування окремого регульованого джерела живлення зі збереженням можливості роздільного регулювання. У разі його застосування в реальних умовах можливо тільки зменшення частоти обертання валу.
Двигун з незалежним збудженням
Двигун постійного струму незалежного збудження реалізує третій підхід до регулювання і цікавий тим, що ОВ і М живляться від різних джерел, схема його представлена нижче.
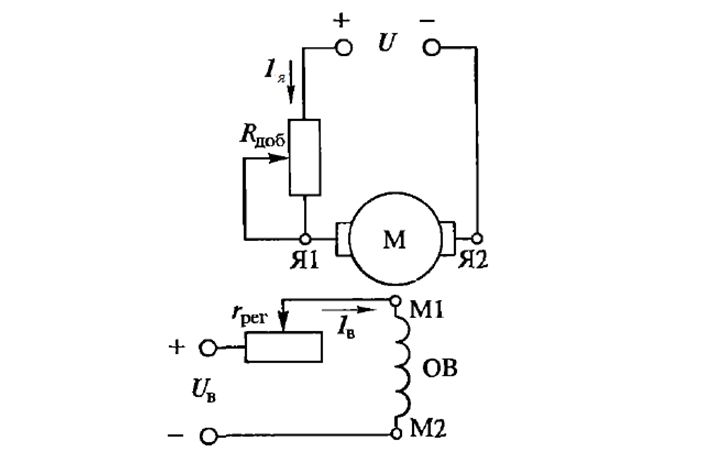
Для моторів в даному конструктивному виконанні I в встановлюється незмінним, а змінюється тільки напруга, прикладена до М. Це супроводжується зміною числа обертів вала на холостому ходу, але жорсткість характеристики змін не зазнає.
Принцип дії такого агрегату за рахунок незалежного функціонування двох джерел виявляється більш складним. Однак, його застосування дає такі важливі для практики переваги як
- плавне економічне керування швидкістю функціонування з великою глибиною;
- пуск мотора при зниженій напрузі без реостата.
У разі, якщо пуск відбувається на нормальному напрузі, реостат обмежує величину I в.
Дослідження показує, що максимальне значення числа оборотів обмежена тільки опором М, а мінімальне - умовами відведення тепла, що виділяється в процесі роботи.
Характеристики в частині енергоспоживання і швидкості спрацьовування керуючої системи поліпшуються в разі послідовного включення з М різних тиристорних регуляторів. Для установки числа обертів вала і їх стабілізації в процесі приведення в рух різних механізмів знаходять застосування різні способи. їх загальним характерною ознакоює включення тиристорного регулятора в ланцюг частотної негативного зворотного зв'язку. Пуск такого агрегату вимагає реалізації спеціальних процедур.
висновок
Двигун з паралельним збудженням є дуже гнучким привідним механізмом і може використовуватися в дуже великій кількості областей там, де не потрібні великі моменти при старті. Має нескладні і надійні ланцюга регулювання швидкості обертання, відрізняється простотою запуску.